Самодельный фазовый лазерный дальномер

В статье я расскажу о том, как я делал лазерный дальномер и о принципе его работы. Сразу отмечу, что конструкция представляет собой макет, и ее нельзя использовать для практического применения. Делалась она только для того, чтобы убедится в том, что фазовый дальномер реально собрать самому.
Теория
Часто приходится встречать мнение, что с помощью лазера расстояние измеряют только путем прямого измерения времени «полета» лазерного импульса от лазера до отражающего объекта и обратно. На самом деле, этот метод (его называют импульсным или времяпролетным, TOF) применяют в основном в тех случаях, когда расстояния до нужного объекта достаточно велики (>100м). Так как скорость света очень велика, то за один импульс лазера достаточно сложно с большой точностью измерить время пролета света, и следовательно, расстояние. Свет проходит 1 метр примерно за 3.3 нс, так что точность измерения времени должна быть наносекундная, хотя точность измерения расстояния при этом все равно будет составлять десятки сантиметров. Для измерения временных интервалов с такой точностью используют ПЛИС и специализированные микросхемы.
Однако существуют и другие лазерные методы изменения расстояния, одним из них является фазовый. В этом методе, в отличие от предыдущего, лазер работает постоянно, но его излучение амплитудно модулируется сигналом определенной частоты (обычно это частоты меньше 500МГц). Отмечу, что длина волны лазера при этом остается неизменной (она находится в пределах 500 — 1100 нм).
Отраженное от объекта излучение принимается фотоприемником, и его фаза сравнивается с фазой опорного сигнала — от лазера. Наличие задержки при распространении волны создает сдвиг фаз, который и измеряется дальномером.
Расстояние определяется по формуле:
Где с — скорость света, f — частота модуляции лазера, фи — фазовый сдвиг.
Эта формула справедлива только в том случае, если расстояние до объекта меньше половины длины волны модулирующего сигнала, которая равна с / 2f.
При превышении этого расстояния возникает неоднозначность — невозможно определить, сколько периодов волны укладывается в измеряемом расстоянии. Для разрешения неоднозначности частоту модуляции лазера переключают, после чего решают получившуюся систему уравнений.
Самый простой случай — использование двух частот, на низкой приблизительно определяют расстояние до объекта (но максимальное расстояние все равно ограничено), на высокой определяют расстояние с нужной точностью — при одинаковой точности измерения фазового сдвига, при использовании высокой частоты точность измерения расстояния будет заметно выше.
Так как существуют относительно простые способы измерять фазовый сдвиг с высокой точностью, то точность измерения расстояния в таких дальномерах может доходить до 0.5 мм. Именно фазовый принцип используется в дальномерах, требующих большой точности измерения — геодезических дальномерах, лазерных рулетках, сканирующих дальномерах, устанавливаемых на роботах.
Однако у метода есть и недостатки — мощность излучения постоянно работающего лазера заметно меньше, чем у импульсного лазера, что не позволяет использовать фазовые дальномеры для измерения больших расстояний. Кроме того, измерение фазы с нужной точностью может занимать определенное время, что ограничивает быстродействие прибора.
Наиболее важный процесс в таком дальномере — это измерение разности фаз сигналов, которая и определяет точность измерения расстояния. Существуют различные способы измерения разности фаз, как аналоговые, так и цифровые. Аналоговые значительно проще, цифровые дают большую точность. При этом цифровыми методами измерить разность фаз высокочастотных сигналов сложнее — временная задержка между сигналами измеряется наносекундами (эта задержка возникает также, как и в импульсном дальномере).
Для того, чтобы упростить задачу, используют гетеродинное преобразование сигналов — сигналы от фотоприемника и лазера по отдельности смешивают с сигналом близкой частоты, который формируется дополнительным генератором — гетеродином. Частоты модулирующего сигнала и гетеродина различаются на килогерцы или единицы мегагерц. Из полученных сигналов при помощи ФНЧ выделяют сигналы разностной частоты.
Пример структурной схемы дальномера с гетеродином. М — генератор сигнала модуляции лазера, Г — гетеродин.
Разность фаз сигналов в таком преобразовании не изменяется. После этого разность фаз полученных низкочастотных сигналов измерить цифровыми методами значительно проще — можно легко оцифровать сигналы низкоскоростным АЦП, или измерить задержку между сигналами (при понижении частоты она заметно увеличивается) при помощи счетчика. Оба метода достаточно просто реализовать на микроконтроллере.
Есть и другой способ измерения разности фаз — цифровое синхронное детектирование. Если частота модулирующего сигнала не сильно велика (меньше 15 МГц), то такой сигнал можно оцифровать высокоскоростным АЦП, синхронизированным с сигналом модуляции лазера. Из теоремы Котельникова следует, что частота дискретизации при этом должна быть в два раза выше частоты модуляции лазера. Однако, так как оцифровывается узкополосный сигнал (кроме частоты модуляции, других сигналов на входе АЦП нет), то можно использовать метод субдискретизации, благодаря которому частоту дискретизации АЦП можно заметно снизить — до единиц мегагерц. Понятно, что аналоговая часть дальномера при этом упрощается.
Более подробно (с всеми нужными формулами) этот метод рассматривается здесь (на английском) и здесь (на русском).
где p — целое число, то процесс вычисления фазы значительно упрощается.
Достаточно взять N выборок сигнала X[i], после чего разность фаз можно вычислить по следующим формулам:
Отмечу, что оба вышеуказанных метода часто применяются вместе — низкочастотные сигналы подаются напрямую на АЦП, высокочастотные переносятся в область более низких частот гетеродинным мотодом, и также подаются на АЦП.
Именно второй вариант фазометра, с использованием частоты модуляции 10МГц я и решил реализовать в своем макете дальномера.
Практика
Структурная схема моего дальномера:

Фактически, вся конструкция состоит из 3 частей — отладочной платы с микроконтроллером, усилителя сигнала лазера с самим лазером, и фотоприемника с усилителем и фильтром.
Схема аналоговой части (усилителя лазера и приемной части):
Схема была взята из проекта лазерной связи Ronja, описание на русском. В этом проекте как раз реализована передача данных со скоростью 10Mbit, что соответствует выбранной частоте модуляции.
Как видно из схемы — усилитель мощности для лазера простейший, собран на микросхеме 74HC04 (содержит 6 инверторов). Включение микросхемы не совсем корректное, но оно работает. Ток через лазер ограничивается резисторами (тоже не самое лучшее решение). Напряжение питания 5В для усилителя берется с отладочной платы.
Сам лазер (красного цвета) взят из пишущего DVD-привода, его мощность можно установить достаточно высокой, и он гарантированно будет работать на частоте 10МГц.
Приемник состоит из фотодиода и усилителя, собранного на полевом транзисторе и микросхеме-высокоскоростном усилителе. Так как с увеличением расстояния освещенность фотодиода сильно падает, то усиление должно быть достаточно большим (в этой схеме оно примерно равно 4000). Кроме того, с ростом частоты заметно падает сигнал на выходе фотодиода (сказывается его емкость). Отмечу, что усилитель в данной конструкции — важнейшая и наиболее капризная часть. Как оказалось, его усиления явно не хватает. Изначально я предполагал, что коэффициент усиления можно будет менять (чтобы ослаблять сигнал при его слишком большой величине), используемая схема позволяет это делать, меняя напряжение на втором затворе транзистора. Однако оказалось, что при изменении усиления достаточно сильно изменяется вносимый усилителем сдвиг фаз, что ухудшает точность измерения расстояния, так что пришлось установить коэффициент усиления на максимум, подавая на затвор транзистора напряжение 3В с батарейки.
Усилитель очень чувствителен к внешним наводкам, так что он тоже должен быть экранированным. Я взял готовый корпус от нерабочего оптического датчика, и разместил усилитель в нем (белая полоска — фольга для дополнительного экранирования фотодиода):

Отмечу, что наводка сигнала от лазера на приемник довольно сильно ухудшает точность измерения разности фаз, так что нужно контролировать, чтобы такая наводка отсутствовала.
LC-фильтр, используемый в дальномере — взят от приемника. Так как фильтр отсекает постоянную составляющую сигнала, а АЦП отрицательные сигналы не воспринимает, то ее приходится добавлять при помощи резисторного делителя R15, R16. Постоянное напряжение, подаваемое на делитель, берется c отладочной платы (VCC).
Отладочная плата — STM32F4-DISCOVERY. Ее выбрал потому, что для формирования двух достаточно различающихся частот нужен генератор достаточно высокой частоты (PLL STM32F4 может давать частоты больше 100МГц).
В формуле, связывающей частоту модуляции и дискретизации, коэффициент «p» я принял равным 6, так что при частоте модуляции 10МГц частота дискретизации должна быть 1.6МГц.
Для формирования частоты 10МГц используется таймер TIM2, работающий в режиме формирования ШИМ сигнала. При системной частоте 160МГц его период — 16 «тиков».
АЦП получает запросы на запуск от таймера TIM2. Для формирования частоты 1.6МГц его период — 100 «тиков». Все данные от АЦП при помощи DMA сохраняются в массив, размер которого должен быть равен двойке в N степени. Оба таймера, АЦП и DMA запускаются один раз при включении и больше уже не отключаются. Таким образом, так как таймеры тактируются от одного источника, а одному периоду измеряемого сигнала соответствуют четыре выборки данных, получается, что в массив всегда попадет целое число периодов сигнала.
Полученные величины выводятся на ЖК индикатор от кассового аппарата, также подключенный к отладочной плате.
Дальномер должен знать где находится начало отсчета. Для его калибровки при включении на «нулевом» расстоянии от дальномера устанавливается объект, после чего на отладочной плате нужно нажать кнопку, при этом измеренное значение дальности записывается в память, после чего это значение будет вычитаться из измеренной дальномером дальности.
Как я уже отмечал выше, реализовать автоматическое управление усилением не удалось. При этом изменение амплитуды принятого сигнала приводит к изменению фазовых сдвигов в усилителе, и следовательно, к дополнительным ошибкам.
Поэтому мне пришлось регулировать освещенность фотодиода при помощи механической заслонки, поворачиваемой сервоприводом — при слишком большой освещенности заслонка перекрывает световой поток. ШИМ сигнал для управления приводом формируется таймером TIM3.
Про оптику. Без нее дальномер невозможен. Ее конструкция хорошо видна на фотографиях ниже. Лазер находится внутри пластиковой трубки, установленной вертикально. В нее вставлена небольшая втулка с зеркальной призмой. Втулку можно поворачивать, поднимать и опускать, перемещая таким образом луч лазера. Так как я догадывался, что усиления не хватит, то для приема сигнала использовал крупную линзу Френеля.
Так так лазер, линза и фотодиод установлены соосно, то на близких расстояниях лазер закрывает от фотодиода собственный луч. Для компенсации этого эффекта я установил вторую линзу (лупа с оправой), хотя полностью эффект не устраняется, поэтому максимальный сигнал наблюдается на расстоянии примерно 50-70 см от лазера.
А вот и фотографии получившейся конструкции:
На индикаторе первое число — амплитуда в единицах АЦП, второе число — расстояние в сантиметрах от края доски.


Видео работы дальномера:
Дальность работы у получившегося дальномера вышла достаточно небольшая: 1,5-2 м в зависимости от коэффициента отражения объекта.
Для того, чтобы увеличить дальность, можно использовать специальный отражатель, на который нужно будет направлять луч лазера.
Для экспериментов я сделал линзовый отражатель, состоящий из линзы, в фокусе которой расположена матовая бумага. Такая конструкция отражает свет в ту же точку, откуда он был выпущен, правда, диаметр луча при этом увеличивается.
Фотография отражателя:
Использование отражателя:
Как видно, расстояние до отражателя — 6.4 метра (в реальности было примерно 6.3). Сигнал при этом возрастает настолько, что его приходится ослаблять, направляя луч лазера на край отражателя.
Точность получившегося дальномера — 1-2 сантиметра, что соответствует точности измерения сдвига фаз — 0,2-0,5 градуса. При этом, для достижения такой точности, данные приходится слишком долго усреднять — на одно измерение уходит 0.5 сек. Возможно, это связано с использованием PLL для формирования сигналов — у него довольно большой джиттер. Хотя я считаю, что для самодельного макета, аналоговая часть которого сделана довольно коряво, в котором присутствуют достаточно длинные провода, даже такая точность — довольно неплохо.
Отмечу, что я не смог найти в Интернете ни одного существующего проекта фазового дальномера (хотя бы со схемой конструкции), что и послужило причиной написать эту статью.
Программа контроллера: ссылка
Автор: iliasam
Источник
www.pvsm.ru
Лазерный дальномер своими руками (видео)
Итак, что же такое дальномер лазерный своими руками? Данное приспособление используется во многих сферах жизни человека. Им еще пользуются геологи и геодезисты. Это устройство можно использовать везде, где требуется произвести замеры расстояния с абсолютной точностью. По этой причине широкую популярность получили лазерные дальномеры, у которых высокие показатели точности и надежности. А можно ли соорудить такое устройство собственными руками?Такой дальномер выполняет измерения благодаря световым потокам. Сигналом выступает электромагнитное излучение, которое окрашено в нужный цвет. Зачастую оно бывает красным. По законам физики скорость света значительно выше скорости звука, поэтому время измерения равного промежутка будет отличаться.

Устройство лазерного дальномера.
Главные причины для установки лазерного дальномера
Использовать рулетку в некоторых случаях неудобно. За последнее десятилетие предпочтение отдается электронным устройствам.
Они работают по принципу бесконтактного способа.
Данное устройство состоит из следующих элементов: платы, микроконтроллера, усилителя сигнала лазера, лазера, фотоприемника, фильтра.
Лазерное излучение образовывается с помощью синусоидального сигнала. Его сложно получить, если частота 10 МГц. Рекомендуется использовать меандр с необходимой частотой. При усилении сигнала, который приходит из фотоприемника, нужно убрать ненужные гармоники специальным полосовым фильтром, работающим на частоте 10 МГц. На выходе образовывается сигнал, который напоминает синусоидальный.
Принцип работы лазерного дальномера
Схема работы лазерного дальномера.
Его принцип является очень простым. Это приемо-передающий прибор, излучающий и принимающий лазерный импульс, который отражается от поверхности.
Однако само по себе это устройство является сложным.
Важными моментами этого устройства являются многофункциональность, максимальный и минимальный промежуток выполнения измерений, точность устройства, воздействие внешних факторов на качество результатов.
Далее будет рассмотрено, как делается лазерный прибор для измерения расстояния.
Выполнение лазерного дальномера своими руками
Такое устройство может находить свое применение, если требуется определить промежуток до объекта, к которому очень сложно добраться.
Список необходимых инструментов и материалов:
Лазерный дальномер из веб камеры.
- ножницы для работ с металлом;
- полоски из железа;
- 2 лазерные указки;
- линейка;
- доски;
- инструмент для столярных работ.
Чтобы выполнить лазерный дальномер своими руками, нужно сначала взять ровную доску из древесины и укрепить на второй доске. Такая конструкция станет основанием для последующего устройства. Оно должно получиться ровным и стоять устойчиво.
Затем необходимо отмерить от одного края начальный отрезок, длина которого должна быть от 50 до 100 см. От того, каким будет промежуток, будет зависеть, насколько точным будет измерение промежутка.
Потом необходимо выполнить 2 равных визира. В этих целях нужно использовать 2 линейки из древесины. На их краях требуется закрепить мушки с прорезями аналогично оружейным. Выполняются они в виде пластинок из угольников железных либо алюминиевых. Далее они прикручиваются шурупчиками по боками деревянных линеек.
Теперь требуется выполнить осевые отверстия, которые будут располагаться строго по центру визиров. Линейки требуется укрепить по краям мерного участка. Нужно учитывать, чтобы 1 визир смог горизонтально вращаться вокруг собственной оси, а другой был надежно прикреплен. Прикрепить на 2 визирах лазерные указки.
Далее нужно расположить дальномер в положение, чтобы на требуемый объект направлялся невращающийся визир. Затем необходимо себе представить, что выполняется прицел на объект из оружия и направить другой визир на этот же объект. Выполняется определение угла между осью другого визира и начальным отрезком. Получится прямоугольный треугольник, где начальный отрезок выступает катетом, а еще известен примыкающий к нему угол. Если применять теорему тангенсов, то можно будет вычислить и второй катет. Его показатель и будет расстоянием до нужного объекта. Вот так выполняется дальномер своими руками.
Вот теперь известно, как правильно делается данное устройство. Из приведенной инструкции ясно, что особых усилий и специальных знаний и умений для этого не требуется. Важно придерживаться того алгоритма и советов, которые описаны выше. Таким лазерным дальномером своими руками будет очень удобно пользоваться, потому как свои силы, свои вложения труда и души намного важнее, и такой прибор очень долго вам прослужит. Стандартные рулетки для измерений уже теряют свою известность, популярность и широкое применение. А с таким прибором будете идти в ногу со временем и инновациями. А вышеописанная инструкция и советы смогут в этом помочь.
Желаем вам удачи!
Автор:
Иван Иванов
Поделись статьей:
Оцените статью:
Загрузка…masterinstrumenta.ru
Лазерная рулетка или обыкновенная для домашнего мастера

Достоверное измерение расстояний — это обязательная операция, сопровождающая любой ремонт квартиры своими руками либо с привлечением бригады строителей.
Она влияет на качество работы, позволяет точно определить количество необходимых материалов, рассчитать стоимость конечных финансовых затрат.
Материал нашей статьи посвящен обычной и лазерной рулетке для домашнего мастера, технологиям точного измерения размеров строительных элементов, определения их геометрии с поясняющими картинками, схемами и видео.
На его основе вы сможете сделать выбор прибора измерения расстояний: пользоваться дальше простой измерительной лентой или приобрести современный лазерный уровень — дальномер со множеством функций, облегчающих повседневную работу профессионального строителя.
Рулетка — измерительный прибор, который может потребоваться для замера от случая к случаю или работать постоянно. Учтите регулярность пользования ею при покупке.
Содержание статьи
Рулетка с мерной лентой
Это самый доступный инструмент, который имеется в рабочем комплекте практически у каждого мастера.

Он имеет простое устройство и нехитрые приспособления, которые незаметны на первый взгляд. Поэтому не все владельцы о них знают.
Особенности конструкции
Общий вид
С лицевой стороны корпуса расположены:
- мерная лента с наконечником;
- ремешок;
- кнопка фиксации ленты.

Эти же элементы с обратной стороны дополняют: скоба для удобного размещения на ремне и винты крепления.

Устройство наконечника
Скоба окончания ленты выполняется подвижной. Это не дефект изготовления, как думают отдельные «рационализаторы», заклепывая его до конца или, хуже того, обрезают и укорачивают ленту. К сожалению, мне встречались такие доработки.

Наконечник мерной ленты строительной рулетки делают подвижным для удобства при замере и повышения его точности. Протяженность его смещения составляет толщину планки скобы, равную 1 мм.
Принципы замера
Нулевой отсчет
Шкала мерной ленты начинается не с нуля, как у обычных линеек, а с 1 мм. Это расстояние при замере от упора, в который упирается наконечник, компенсируется его толщиной за счет сдвига по прорезям скобы относительно заклепок.

При установке конца рулетки на торец детали наконечник выдвигается в противоположную сторону на 1 мм, а измерение снова начинается с нуля.

3 способа замера глубины проема
В проемах сразу снять отсчет не получается: длина ленты рулетки не дает это сделать точно. Поэтому используют один из следующих методов измерения.
Изгиб ленты
Наконечник рулетки упирают в начало проёма, а выпущенную ленту загибают так, чтобы она заполнила полностью проем и была видна шкала на изгибе.

Метод замера приблизительный. Но в большинстве случаев такой точности вполне достаточно.
Учет длины корпуса
Между двумя противоположными концами проема размещают рулетку с полностью выдвинутой лентой. Снимают отсчет и прибавляют к нему длину корпуса прибора. Его размер может быть промаркирован в условиях заводе или измерен самостоятельно.

На фото видно, что в моей рулетке он выполнен длиной 60 мм. Этот метод замера работает точнее предыдущего.
Сложение двух измерений
Когда необходима высокая точность замера, то около середины проема делают отметку карандашом, а если его поверхность декоративная, то можно наклеить кусочек строительного скотча. Он легко удаляется водой, не оставляет следов.
Форму метки лучше выполнить в форме галочки с острым концом — указателем, а не отрезка линии. Она работает точнее.

Показанные на фото в качестве примера два результата измерения от каждого края складывают и получают общий размер: 41,9+38,8=79,7 см.
Дополнительные возможности
Посредством простой доработки можно превратить рулетку в циркуль, использовать его для более сложной разметки.
На корпусе прибора ослабляют один крепежный винт и вводят в него прорезь жестяного самодельного крепления карандаша.

Саморез сразу плотно зажимают.

Наконечник мерной ленты прорезью надевают на головку ввернутого шурупа.

Это позволяет:
- вычерчивать окружности и дуги различных размеров;
- проводить перпендикуляры к точкам горизонтальных линий;
- точно разделять углы на равные части.
Черчение дуги или окружности

Фотография наглядно демонстрирует этот процесс.
Как провести перпендикуляр
Используя рулетку в качестве циркуля можно начертить две окружности с центрами на контрольной линии или сделать засечки отрезками дуги.

Точки их пересечения необходимо соединить прямой, которая будет направлена строго под 90 градусов к исходному направлению.
Разделение угла на равные части
Рассмотрим на примере квадрата. На удалении от угла прикладываем мерную ленту рулетки для образования равнобедренного треугольника. На его основании должны быть хорошо видны деления, кратные количеству углов, например, 10. 20, 30. Через них проводим лучи, разделяющие угол на равные три части по тридцать градусов каждый.

Как видите простая рулетка позволяет выполнять измерения и разметку различными способами, но их может значительно облегчить современный измерительный прибор с электронной начинкой.
Лазерный дальномер
Прибор относится к большому классу лазерных уровней, выпускаемых промышленностью широким ассортиментом. Это позволяет выбирать под себя модель, необходимую для работы в различных условиях, например, измерять расстояния на труднодоступных объектах.
Устройство
Пластмассовый корпус лазерной рулетки изготавливают для работы в условиях стройки. Он содержит:
- с внешней стороны кнопки управления и дисплей;
- задний отсек для элементов питания;
- торцевой излучатель и приемник лазерного луча.
Прямоугольная форма корпуса позволяет располагать дальномер горизонтально, вертикально или класть на бок для выполнения точных измерений различными способами.

Вмонтированный жидкостный или электронный ватерпас предназначен для облегчения ориентации корпуса при выполнении различных замеров.
Защитный чехол дальномера поддерживает сохранность прибора в исправном состоянии во время транспортировки и эксплуатации.
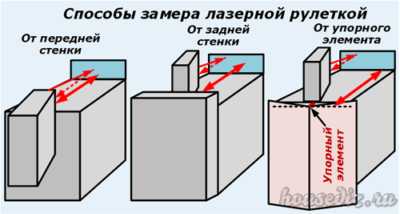
Способы измерений
Прибор дальномер работает на больших расстояниях с точностью до 1 мм. Им можно выполнять замеры от:
- передней кромки, располагая ее, например, с торца стола;
- задней части, поднеся его вплотную к стене;
- заднего края упорного элемента для определения диагонали помещения.
Лазерный дальномер позволяет выполнять замер:
- одноразово с фиксацией в памяти;
- непрерывно для выбора оптимальной дистанции.
Для особо точных работ прибор необходимо стационарно фиксировать на штативе.
Вычисления и память
Лазерный дальномер на основе сделанных замеров вычисляет:
- площадь помещения;
- объем;
- высоту.
Определение площади и объема
В меню прибора выбирают соответствующий режим, который подтверждается пиктограммой площади или объема на встроенном дисплее.

Затем последовательно наводят лазерный луч на указанный объект и фиксируют его кнопкой. Лазерная рулетка выполняет расчеты, заносит информацию в память, отображает ее на дисплее.
Расчет высоты
На недоступных объектах можно использовать замер удаленных объектов косвенным способом, направив луч лазера дальномера строго по горизонтальной плоскости и диагонали. Прибор вычислит высоту по теореме Пифагора с высокой степенью точности.

Электронная память
Предназначена для хранения констант, используемых в алгоритме вычислений, обработки данных и возможности обеспечения передачи информации, например, по домашним беспроводным каналам связи Bluetooth.
Луч лазера от дальномера нельзя направлять на людей и животных. При попадании в сетчатку глаза он может вызвать необратимые процессы, которые приведут к потере зрения. Работайте в защитных очках.
Для любителей получать информацию с видеороликов рекомендуем дополнительно посмотреть работу автора «Закажи из Китая» “Лучший дальномер с Алиэкспресс”.
Вам сейчас удобно прокомментировать статью и поделиться ею с друзьями в соц сетях.
Полезные товарыhousediz.ru
как выбрать электронную (цифровую) рулетку для строительства, как работает, как пользоваться
Лазерная рулетка незаменима в строительстве и отделке, туризме и лесничестве, во многих других отраслях. Ею можно производить замеры не только в помещениях, но и на улице. Ведь максимальная дальность измерения достигает 250 метров, а с использованием отражателя 900 метров. В отличие от обычной рулетки, электронная измеряет точнее, быстрее и без помощи второго человека. Как правильно выбрать строительный лазерный дальномер?
Устройство и принцип действия лазерной рулетки
Лазерная рулетка представляет собой небольшой прибор, состоящий из оптических и электронных компонентов.
Устройство лазерной рулетки

Устройство лазерной рулетки
- Корпус. У большинства приборов он сделан из пластика и имеет эргономичные вставки. Корпус защищает устройство от влаги и пыли.
- Излучатель сигнала.
- Приёмник сигнала.
- Преобразователь сигнала. Находится в корпусе. Преобразует световой формат в цифровой.
- Дисплей. На него выводятся полученные данные. Выполнен на жидких кристаллах. Для хорошей видимости в дневное время дисплей имеет сильную подсветку.
- Электронный блок управления. Расположен внутри корпуса.
- Аккумулятор.
- Панель управления с кнопками.
Лазерная рулетка не измеряет расстояние в буквальном смысле. Она обрабатывает полученные данные, преобразуя их в расстояние.

Схема работы лазерного дальномера
Принцип действия прибора заключается в следующем:
- Пользователь нажимает на кнопку;
- Прибор генерирует световой поток и с помощью излучателя посылает его в прямом направлении;
- Дойдя до цели, луч возвращается обратно, попадая в приёмник;
- Преобразователь конвертирует световой поток в цифровой сигнал;
- Процессор вычисляет расстояние исходя из времени прохождения луча туда и обратно, и скорости движения;
- Полученный результат выводится на дисплей. Скорость обработки данных у бытовых приборов до 3 секунд, а профессиональные срабатывают за долю секунды.
Функции и применение строительного дальномера
Лазерная рулетка не только измеряет расстояния, но и выполняет другие функции, в зависимости от модели:
Включение в прибор дополнительных функций увеличивает его стоимость.
Видео: обзор функций дальномера для строительства
Применение лазерного дальномера достаточно широко:
- строительство;
- ремонт и отделка помещений;
- производство и монтаж мебели;
- монтаж оборудования;
- топографическая съёмка;
- геодезия;
- ландшафтный дизайн;
- туризм и альпинизм;
- лесничество и охота;
- геология и археология;
- монтаж рекламных плакатов.
Как выбрать электронную рулетку
При выборе лазерной рулетки определите задачи, для которых вы будете её использовать, чтобы не переплачивать за наличие всевозможных функций прибора. Основные критерии выбора:
- класс прибора:
- бытовой. Дальность действия до 60 метров. Погрешность измерений 1,5 мм. Для замеров в квартире, частном доме или дачном участке этого вполне достаточно;
- профессиональный. Дальность действия до 250 метров и выше. Погрешность достигает 1 метра;
- класс лазера:
- 1-й класс имеет луч мощностью менее 1 мВт. Цвет зелёный и хорошо виден и безопасен для глаз. Такой тип лазера используется в профессиональных дальномерах;
- 2 класс имеет луч мощностью 1 мВт. Цвет красный. Опасен для человеческого глаза. Используется в бытовых дальномерах;
- наличие оптического прицела или визира. На бытовых приборах устанавливается редко;

Дальномер с оптическим прицелом
- количество начальных точек отсчёта. Это точки, от которых начинается замер. Их может быть от 1 до 4;
- корпус и линзы. На профессиональных устройствах корпус имеет защиту от влаги и пыли. Линзы невосприимчивы к высокой влажности и не запотевают. Такие приборы работают при температурах ниже 50 и выше 50 градусов;
- эргономичные вставки и противоударный буфер. Для того чтобы прибор не выскальзывал. Ну а если это произошло, чтобы не разбился. Для стройки полезная опция;
- производитель. Очень качественные дальномеры производят Bosch, Stabila и Leica. Среди китайских фирм пользуются спросом ADA и Condtrol;
- гарантия и сервис. Гарантия должна быть не менее 1 года. Также уточняйте наличие сервисной мастерской в вашем городе.
- комплектация. Некоторые модели комплектуются штативом или очками.
- наличие дополнительных функций. В зависимости от вида работ выберите функции, которые должны присутствовать в вашей рулетке.

Для строительства простых измерений расстояния, площади и объёма не достаточно. Присмотритесь к профессиональным приборам с расширенным функционалом.
Как пользоваться цифровым измерительным устройством
Лазерные рулетки разных моделей отличаются функционалом. Рассмотрим самые распространённые варианты используемых функций.
Кнопки панели управления

Кнопки панели управления
- 1 — кнопка включения прибора и запуска измерения;
- 2 — кнопка активации цифровой камеры;
- 3 — крестообразный джойстик. В центре расположена кнопка ввода действия и знака «равно»;
- 4 — кнопка отмены действия и выключения прибора;
- 5 — с помощью этих кнопок можно запрограммировать часто используемые функции. По одной функции на каждую кнопку;
- 6 — переход к просмотру и выбору функций;
- 7 — кнопки для простого сложения и вычитания.
Основные действия:
Рекомендации по использованию
- Если у вас нет оптического или цифрового визира, купите очки для лазерных приборов. С их помощью вы сможете видеть луч днём.
- Так как лазерные рулетки часто используются на строительных площадках, на них попадает много пыли. Поэтому прибор нужно протирать в конце работы. Хранить в сухом и чистом чехле.
Видео: как пользоваться электронной линейкой при строителных работах
Лазерная рулетка многофункциональна и удобна. Проста в использовании. Имея в арсенале такой прибор, вы сможете быстро произвести замеры для стройки или ремонта. Вам не придётся вручную высчитывать площади. При правильном выборе строительного дальномера со всеми необходимыми функциями вы получите незаменимый инструмент.
postroika.biz
Лазерный дальномер
Изобретение относится к области оптических измерений и может быть использовано для определения расстояний порядка десятков-сотен метров при производстве строительных и изыскательных работ. Дальномер, отличающийся повышенной точностью измерений и сравнительной простотой технической реализации, содержит блок формирования лазерного луча и блок приема отраженного луча, установленные с возможностью взаимного углового или линейного перемещения их оптических осей в одной плоскости, а также блок взаимного перемещения указанных оптических осей, блок определения дальности и блок управления. Достижение указанного результата обеспечивается применением геометрического способа измерения дальности в сочетании со сканированием диаграммы направленности блока формирования лазерного луча или блока приема отраженного луча в плоскости, проходящей через точку визирования на объекте, расстояние до которого определяется. 6 ил.
Изобретение относится к области оптических измерений и может быть использовано, в частности, для определения расстояний порядка десятков-сотен метров при производстве строительных и изыскательских работ.
Известны светодальномеры, в которых расстояние до некоторого объекта определяется по разности фаз сигнала, отраженного от объекта, и опорного сигнала [1, 2] Наиболее близким техническим решением является лазерный дальномер [3] выполненный по схеме электронно-оптического фазового определения дальности, содержащий блок формирования лазерного луча, модулятор, обеспечивающий модуляцию фазы сигнала, блок приема отраженного луча, демодулятор и блок определения дальности (электронную схему, обеспечивающую обработку отраженного от объекта сигнала). Известные технические решения, в том числе [3] обладают рядом недостатков, ограничивающих область их применения для измерения сравнительно небольших (порядка 100 м) расстояний. К числу таких недостатков относятся необходимость высокочастотной модуляции излучения лазера и сложность электронной схемы блока определения дальности, включающей большое количество высокочастотных электронных элементов, а также сравнительно невысокая точность измерения расстояния в указанном диапазоне, ограниченная применяемым методом измерения и техническими сложностями реализации высокочастотной модуляции лазерного излучения. В этой связи, применение известных схем устройств для реализации компактных недорогих и одновременно высокоточных дальномеров, оптимизированных для проведения контрольно-измерительных операций в процессе монтажа строительных конструкций, не представляется целесообразным. Задачей настоящего изобретения является реализация лазерного дальномера для измерения расстояний в пределах десятков-сотен метров, свободного от перечисленных выше недостатков и предназначенного преимущественно для метрологического обеспечения строительно-монтажных работ и построения на его основе контрольно-измерительных систем широкого назначения. Достигаемый технический результат заключается в повышении точности дальномера, упрощении его электронной схемы и устранение необходимости высокочастотной модуляции лазерного излучения. Лазерный дальномер, позволяющий решить поставленную задачу, содержит, аналогично устройству-прототипу, блок формирования лазерного луча и блок приема отраженного луча, оптические оси которых установлены в одной плоскости, а также блок определения дальности, первый вход которого соединен с выходом блока приема отраженного луча, а выход и второй вход блока определения дальности являются соответственно информационным выходом и первым управляющим входом дальномера, и отличается тем, что блок формирования лазерного луча и блок приема отраженного луча установлены с возможностью взаимного углового или линейного перемещения их оптических осей в плоскости установки, введены блок взаимного перемещения оптических осей и блок управления, вход которого является вторым управляющим входом дальномера, а первый и второй выходы блока управления подключены соответственно ко входу блока взаимного перемещения оптических осей и третьему входу блока определения дальности. Достижение указанного эффекта обеспечивается применением качественного отличного геометрического способа измерения дальности, аналогичного в известной степени определению параллактического угла при заданной базе (расстоянии между блоком формирования лазерного луча и блоком приема отраженного луча), в сочетании со сканированием диаграммы направленности одного из указанных блоков в плоскости, проходящей через точку визирования на объекте, расстояние до которого определяется. На фиг. 1 показана обобщенная структурная схема дальномера (вариант углового перемещения оптической оси блока формирования лазерного луча). Фиг. 2 и 3 иллюстрируют другие возможные варианты реализации схемы дальномера, отличающиеся способом сканирования. На фиг. 4 показан вариант реализации блока определения дальности, а на фиг. 5 блока управления. На фиг. 6 представлена временная диаграмма, поясняющая работу дальномера. Лазерный дальномер (фиг. 1) содержит блок формирования лазерного луча 1, блок приема отраженного луча 2, блок определения дальности 3, блок 4 взаимного перемещения оптических осей блоков 1 и 2 и блок управления 5. На фиг. 1 показаны также нумерация и функциональное назначение связей указанных блоков. В показанном на фиг. 1 варианте реализации дальномера, блок 4 представляет собой привод углового перемещения, обеспечивающий непосредственное угловое перемещение блока 1 формирования лазерного луча (изменение угла при сохранении постоянного расстояния между блоками 1 и 2). Для реализации блока взаимного перемещения оптических осей может быть также использован привод линейного перемещения 6 в сочетании с перемещающимся зеркалом 7 (см. фиг. 2), обеспечивающий изменение базового линейного размера L при неизменном угловом положении блоков 1 и 2. При этом может осуществляться как указанное выше изменение положения оптической оси блока 1, так и аналогичное сканирование диаграммы направленности приемного тракта (оптической оси блока 2 приема отраженного луча). Возможно также электронное сканирование луча блока 1 (фиг. 3) за счет использования размещаемого на его пути отклоняющего элемента 8, обеспечивающего угловую развертку луча. Конкретный способ сканирования и, соответственно, реализации блока 4 не является принципиальным с точки зрения существа предлагаемого метода измерений и определяется исходя из технико-экономических параметров устройства. Блок определения дальности 3 содержит (фиг. 4) делитель частоты 9, триггеры 10 и 11, элементы И 12 и 13, элемент ИЛИ 14, счетчик 15, функциональный преобразователь 16 и элемент задержки 17. Электрические связи элементов блока 3 и нумерация его входов видны из фиг. 4. Блок управления (фиг. 5) содержит триггер 18, генератор тактовых импульсов 19, счетчик 20 и генератор изменяющегося напряжения 21. Электрические связи видны на фиг. 5. Такая реализация блока уплотнения предназначена для случая электронного сканирования в соответствии с фиг. 3, инициируемого изменяющимся напряжением на выходе генератора 21, подаваемым на вход отклоняющего элемента 8. В случае же механического сканирования (фиг. 1 или 2) посредством взаимного перемещения осей с помощью шаговых электрических приводов, управляемых последовательностью импульсов, в качестве выходного сигнала блока 5 может использоваться непосредственно выход генератора тактовых импульсов 19 (в этом случае генератор изменяющегося напряжения не используется). Все элементы, входящие в состав блоков дальномера, являются известными. В качестве блока 1 формирования лазерного луча может быть использован малогабаритный полупроводниковый лазерный диод с соответствующей оптической коллимирующей системой [4] Для реализации блока 2 приема отраженного луча может использоваться любой фотоприемник (например, фотодиод или фотоэлектронный умножитель) [4] с соответствующей оптической системой (объективом) на входе, усилителем и компаратором [5] на выходе, формирующем сигнал логической единицы при превышении оптическим потоком на входе фотоприемника некоторого порогового уровня. Для реализации блока 4 взаимного перемещения оптических осей в соответствии с фиг. 1, 2 могут использоваться любые прецизионные приводы углового или линейного перемещения, в частности, шаговые пьезоэлектрические двигатели [6] управляемые последовательностью электрических импульсов. В случае реализации схемы с электронным сканированием в соответствии с фиг. 3, для реализации блока 4 могут использоваться управляемые электрическим напряжением электрооптические или ультразвуковые отклоняющие устройства [4] Блоки 3 определения дальности и 5 управления реализуются на стандартной электронной элементной базе [5] Делитель частоты 9, формирующий на своем выходе последовательность импульсов с частотой f/2, где f частота входной последовательности импульсов, может быть реализован, например, на основе счетного триггера [5] Функциональный преобразователь 16 представляет собой реализуемую по известному алгоритму электрическую схему вычислителя, обеспечивающего формирование на выходе цифрового кода по заданной величине входного сигнала при известной функциональной зависимости между ними (см. описание работы дальномера). Указанный преобразователь может представлять собой, например, программируемую логическую матрицу. Генератор 21 может представлять собой, например, генератор линейно изменяющегося напряжения [7] развертка которого инициируется входным импульсом напряжения. Элемент задержки 17 может представлять собой, в частности, одновибратор с фиксированным временем задержки выходного импульса по отношению к входному уровню напряжения. Лазерный дальномер работает следующим образом. Поскольку оптические оси блоков формирования лазерного луча и приема отраженного луча устанавливаются в одной плоскости, диаграммы направленности указанных блоков создают в пространстве зону чувствительности с центром в точке пересечения осей. Геометрия системы (диапазон изменения угла a и значение расстояния между блоками 1 и 2 для схем фиг. 1, 3 или диапазон изменения базового размера L и фиксированное значение угла между оптическими осями для схемы фиг. 2) выбирается таким образом, чтобы обеспечить при том или ином варианте взаимного перемещения оптических осей перемещение указанной зоны чувствительности в пределах от минимальной до максимальной дальности измерений. При сканировании диаграммы направленности блока 1 (или 2) зона чувствительности непрерывно или дискретно перемещается в пространстве, при этом при попадании в нее объекта измерений (см. фиг. 1) формируется выходной сигнал блока приема отраженного луча. Таким образом искомая величина расстояния до объекта может быть определена путем соответствующего геометрического расчета по определяемым тем или иным способом в момент попадания объекта в зону чувствительности величинам a или L. При реализации блоков 3 и 5 дальномера согласно фиг. 4, 5 функционирование дальномера осуществляется в следующей последовательности. Наводка дальномера на объект измерения осуществляется либо по видимому пятну излучения лазера на его поверхности, либо в случае использования лазера инфракрасного диапазона, с помощью оптического визира (на фиг. 1 не показан), оптическая ось которого совпадает (или установлена параллельно) с оптической осью неподвижного блока приема отраженного луча. Цикл работы устройства начинается с подачи импульса напряжения на первый управляющий вход дальномера (см. временную диаграмму фиг. 6а), в результате которого происходит сброс триггера 11 и обнуление счетчика 15 в блоке 3 определения дальности, а также опрокидывание триггера 10, открывающего элемент И 13 для прохождения импульсов на вход счетчика. Поступающий затем на второй управляющий вход импульс (фиг. 6б) обнуляет счетчик 20 и опрокидывает триггер 18, выходной сигнал которого запускает генератор изменяющегося напряжения 21 (фиг. 6 в) и одновременно инициирует формирование последовательности тактовых импульсов частотой f на выходе генератора 19 (фиг. 6 г). Указанные тактовые импульсы поступают со второго выхода блока 5 на третий вход блока 3 и одновременно на счетный вход счетчика 20, сигнал переполнения которого ограничивает максимальное количество импульсов на выходе генератора 19 (см. фиг. 5, 6г). Изменение напряжения на выходе генератора 21 (фиг. 6 в) сопровождается соответствующим изменением угла a отклонения луча отклоняющим элементом 8 (фиг. 3), в результате чего и происходит сканирование пространство предметов лучом блока 1 (см. фиг. 1). Одновременно со сканированием происходит подсчет количества тактовых импульсов частотой f, проходящих с третьего входа блока 3 через открытый элемент И 13 и на счетный вход счетчика 15 (фиг. 4). При попадании объекта в зону чувствительности, на входе фотоприемника блока 2 появляется соответствующий оптический сигнал (фиг. 6д), преобразуемый блоком 2 в сигнал постоянного уровня некоторой длительности t2 (фиг. 6е). Передним фронтом этого сигнала закрывается триггер 10 (фиг. 4), в результате чего блокируется элемент И 13. Одновременно тем же сигналом открывается для прохождения импульсов элемент И 12. Таким образом, с указанного момента на вход счетчика 15 поступает последовательность импульсов с выхода делителя 9 частотой f/2 (фиг. 6ж). По окончании сигнала фотоприемника элемент И 12 закрывается, блокируя тем самым поступление импульсов на вход счетчика 15. Одновременно задним фронтом этого сигнала (фиг. 6е) опрокидывается триггер 11. Таким образом, по окончании оптического сигнала на выходе фотоприемника (выходе объекта из зоны чувствительности) на выходе счетчика устанавливается и сохраняется выходной код N, соответствующий количеству поступивших на его вход за время t1+t2 импульсов (фиг. 6е, ж). Функциональный преобразователь 16 преобразует указанный код в соответствующую величину дальности l на его выходе. При этом, после окончания переходных процессов в преобразователе 16, на выходе элемента задержки 17 появляется сигнал разрешения считывания, используемый для записи выходной информации (величины l9 во внешнее запоминающее устройство или регистр блока индикации результата измерения, если последний предусматривается в составе дальномера. Конкретная реализация указанных блоков не принципиальна с точки зрения сущности метода измерения и может быть осуществлена традиционными способами. Информационный выход блока 3, как это видно из фиг. 4, представляет собой выходную шину данных преобразователя 16 совместно с выходом элемента 17. Общее число импульсов, подсчитанных счетчиком 16, оказывается пропорциональным интервалу времени t t1 + t2/2 (см. фиг. 6е) и тем самым, углу a (или, аналогично, линейному размеру L при использовании линейного сканирования) в момент пересечения оптических осей блоков 1 и 2 на объекте измерений. При этом, за счет описанного алгоритма определения центрального положения зоны чувствительности устраняется влияние помех и шумов, искажающих оптический сигнал на входе фотоприемника (фиг. 6д). Кроме того, повышение помехозащищенности дальномера может быть достигнуто за счет модуляции (например, амплитудной) луча блока формирования 1 и селективного приема модулированного излучения блоком приема 2, осуществляемых известным способом [4] Конкретная зависимость между величиной N и искомым значением дальности, задающая алгоритм функционального преобразователя 16, определяется реализуемым вариантом оптической схемы, ее геометрическими параметрами и характеристиками входящих в состав дальномера элементов. Для описанного выше варианта углового перемещения оптической оси блока 1 с помощью отклоняющего элемента 8, в связи с малостью угла a при l>L имеет (см. фиг. 1): где w угловая скорость перемещения луча. Указанная формула соответствует отсчету угла от его нулевого положения, при котором оси блоков 1 и 2 параллельны друг другу. При заданных величинах L, f и w, той или иной подсчитанной счетчиком 15 величине N однозначно соответствует значение дальности l, вычисляемое преобразователем 16. В случае же линейного сканирования (фиг. 2) функция преобразования имеет вид где V линейная скорость перемещения луча (зеркала 7), L максимальный размер базы, соответствующий верхнему диапазону измерения расстояния l. В этом случае началу отсчета соответствует взаимное положение блоков 1 и 2, при котором расстояние между ними максимально. Реализуемый предполагаемым дальномером способ измерений характеризуется высокой потенциальной точностью при условии стабильности во времени частоты f и скорости сканирования, не требуя при этом высокочастотной модуляции лазерного луча и сложной электронной обработки результата измерений. Предельная величина методической погрешности измерения при заполнении указанных выше условий определяется предельной случайной погрешностью квантования временного интервала счетными импульсами, которая обратно пропорциональна частоте f следования импульсов [7] Так как интервал времени t2 (фиг. 6е) заполняется импульсами с частотой следования f/2, максимальная ошибка при квантовании не превышает 2 импульса. Соответствующая величина абсолютной погрешности определения дальности Dl может быть определена исходя из этого условия и представленных выше соотношений. Например, для схемы с линейным сканированием при f 106 Гц, L 0,2 м, V 1 м/с, lmax 100 м, имеем l 1 мм. При этом время измерений не превышает 0,2 сек. Таким образом, на основе предложенной схемы могут быть реализованы высокочастотные быстродействующие малогабаритные лазерные дальномеры, имеющие ряд преимуществ по сравнению с традиционными фазовыми. Точность дальномера в полевых условиях измерений может быть повышена также за счет статистической обработки результатов ряда последовательных измерений и той же величины дальности.Формула изобретения
Лазерный дальномер, содержащий блок формирования лазерного луча и блок приема отраженного луча, оптические оси которых установлены в одной плоскости, а также блок определения дальности, первый вход которого соединен с выходом блока приема отраженного луча, а выход и второй вход блока определения дальности являются соответственно информационным выходом и первым управляющим входом дальномера, отличающийся тем, что блок формирования лазерного луча и блок приема отраженного луча установлены с возможностью взаимного углового или линейного перемещения их оптических осей в плоскости установки, введены блок взаимного перемещения оптических осей и блок управления, вход которого является вторым управляющим входом дальномера, выходы блока управления подключены соответственно к входу блока взаимного перемещения оптических осей и третьему входу блока определения дальности.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6findpatent.ru
Самодельный сканирующий лазерный дальномер

В этой статье я расскажу о том, как я делал самодельный лазерный сканирующий дальномер, использующий триангуляционный принцип измерения расстояния, и об опыте его использования на роботе.
Зачем нужен сканирующий дальномер?
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера — один из них. Важное достоинство этого метода — он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток — сложность, и соответственно, цена дальномера.
Традиционно в робототехнике используются лазерные сканеры, использующие фазовый или времяпролетный принцип для измерения расстояния до объектов. Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные — используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния.
Но для домашних экспериментов в робототехнике такие сканеры мало подходят — цена на них начинаются от 1000$.
На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:

Довольно быстро любители расшифровали протокол этого дальномера, и начали использовать его в своих проектах. Сами дальномеры в качестве запчастей появились на ebay в небольших количествах по цене около 100$. Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся как полноценный прибор, а не запчасть. Только цена этих дальномеров оказалась достаточно высокой — 400$.
Самодельный дальномер
Как только я узнал о дальномерах Neato, мне захотелось собрать самому аналогичный. В конце концов, мне это удалось, и процесс сборки я описал на Робофоруме.
Первая версия дальномера:
Позже я сделал еще одну версию дальномера, более пригодную для использования на реальном роботе, но и ее качество работы не полностью устроило меня. Настало время третьей версии дальномера, и именно она будет описана далее.
Устройство сканирующего триангуляционного лазерного дальномера
Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив (h) и измеренный угол, можно вычислить расстояние до объекта — чем меньше угол, тем больше расстояние.
Принцип хорошо иллюстрирует картинка из статьи:

Таким образом, ключевые оптические компоненты такого дальномера — лазер, объектив и фотоприемная линейка.
Так как дальномер сканирующий, то все эти детали, а так же управляющая электроника устанавливаются на вращающейся головке.
Тут может возникнуть вопрос — зачем нужно вращать оптику и электронику, ведь можно установить вращающееся зеркало? Проблема в том, что точность дальномера зависит от расстояния между объективом и лазером (базового расстояния), так что оно должно быть достаточно большим. Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния. Дальномер с таким зеркалом получается достаточно громоздким.
Сканирующая головка дальномера при помощи подшипника закрепляется на неподвижном основании. На нем же закрепляется двигатель, вращающий головку. Также в состав дальномера должен входить энкодер, предназначенный для получения информации о положении головки.
Как видно, дальномеры Neato, RPLIDAR и мои самодельные сделаны именно по этой схеме.
Самое сложное в самодельном дальномере — изготовление механической части. Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера. Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не нее нужно каким-то образом передавать электрические сигналы.
Во второй версии дальномера первые две проблемы я решил, использовав части старого HDD — сам диск использовался как основание сканирующей головки, а двигатель, на котором он закреплен, уже содержал качественные подшипники. В то же время, при этом возникла третья проблема — электрические линии можно было провести только через небольшое отверстие в оси двигателя. Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной. При этом возникла еще одна проблема — линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками — на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы.
Фотография второй версии дальномера:

Еще один недостаток получившегося дальномера — низкая скорость сканирования и сильное падение точности на расстояниях больше 3м.
Именно эти недостатки я решил устранить в третьей версии дальномера.
Электроника
В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента -светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее. Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты. Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрихкодов — тоже не самые короткие и быстрые.
В первой и второй версии дальномера я использовал линейки TSL1401 и ее аналог iC-LF1401. Эти линейки хорошо подходят по размеру, они дешевые, но содержат всего 128 пикселей. Для точного измерения расстояния до 3 метров этого мало, и спасает только возможность субпискельного анализа изображения.
В третьей версии дальномера я решил использовать линейку ELIS-1024:

Однако купить ее оказалось непросто. У основных поставщиков электроники этих линеек просто нет.
Первая линейка, которую я смог купить на Taobao, оказалась нерабочей. Второю я купил на Aliexpress (за 18$), она оказалась рабочей. Обе линейки выглядели паянными — обе имели облуженные контакты и, судя по маркировке, были изготовлены в 2007 году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS-1024 можно купить только напрямую у производителя.
Светочувствительная линейка ELIS-1024, как следует из названия, содержит 1024 пикселя. Она имеет аналоговый выход, и достаточно просто управляется.
Еще более хорошими характеристиками обладает линейка DLIS-2K. При сходных размерах, она содержит 2048 пикселей и имеет цифровой выход. Насколько мне известно, именно она используется в дальномере Neato, и возможно, в RPLIDAR. Однако, найти ее в свободной продаже очень сложно, даже в китайских магазинах она появляется не часто и дорого стоит — более 50$.
Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров — STM32F303, которые, при относительно небольшой стоимости, имеют несколько быстрых АЦП, способных работать одновременно.
В результате у меня получилась такая схема: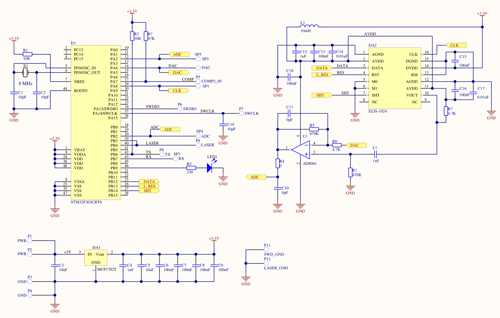
Сигнал с линейки (вывод 10) имеет достаточно высокий уровень постоянной составляющей, и ее приходится отфильтровывать при помощи разделительного конденсатора.
Далее сигнал нужно усилить — для этого используется операционный усилитель AD8061. Далеко расположенные объекты дают достаточно слабый сигнал, так что пришлось установить коэффициент усиления равным 100.
Как оказалось в результате экспериментов, даже при отсутствии сигнала, на выходе выбранного ОУ по какой-то причине постоянно присутствует напряжение около 1.5В, что мешает обработке результатов и ухудшает точность измерения амплитуды сигнала. Для того, чтобы избавится от этого смещения, мне пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
3D рендер разведенной печатной платы:
Плату разводил двухстороннюю, сделать такую плату в домашних условиях качественно довольно сложно, так что заказал изготовление плат в Китае (пришлось заказать сразу 10 штук):

В этом дальномере я использовал дешевый объектив с резьбой M12, имеющий фокусное расстояние 16мм. Объектив закреплен на печатной плате при помощи готового держателя объектива (такие используются в различных камерах).
Лазер в данном дальномере — инфракрасный (780 нм) лазерный модуль, мощностью 3.5 мВт.
Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже оказалось, что с используемой линейкой в этом нет смысла, и поэтому сейчас лазер включен постоянно.
Для проверки работоспособности электроники была собрана вот такая конструкция, имитирующая сканирующую головку дальномера:

Уже в таком виде можно было проверить, какую точность измерения расстояния позволяет обеспечить дальномер.
Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК.
Пример вида сигнала с линейки (объект на расстоянии 3 м).
Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом.
Механическая часть
После того, как электроника была отлажена, настало время изготовить механическую часть.
В этот раз я не стал связываться с механикой из HDD, и решил изготовить механические детали из жидкого пластика, заливаемого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе и на Гиктаймс.
Уже после того, как я изготовил детали, стало понятно, что изготовить детали на 3D принтере было бы проще, они могли выйти тверже, и возможно, можно было бы сделать одну деталь вместо двух. Доступа к 3D принтеру у меня нет, так что пришлось бы заказывать изготовление детали в какой-либо компании.
Фото одной из деталей сканирующей головки дальномера:

Эта деталь является основой головки. Она состоит из втулки, на которую позже надевается подшипник, и диска. Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Втулка и диск содержат сквозное отверстие, в которое вставляется покупной щеточный узел на 6 линий — его видно на фотографии. Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла. Для повышения стабильности работы для передачи сигналов GND и UART TX используется 2 пары линий щеток. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Силиконовая форма для отливки этой детали:

Вторая деталь сканирующей головки была изготовлена тем же способом. Она предназначена для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, так что ее можно увидеть только в составе дальномера.
Для крепления сканирующей головки к основанию дальномера используется шариковый подшипник. Я использовал дешевый китайский подшипник 6806ZZ. Честно говоря, качество подшипника мне не понравилось — ось его внутренней втулки могла отклонятся относительно оси внешней на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Крепление подшипника к детали с диском и основанию будет показано ниже.
Основание я сделал из прозрачного оргстекла толщиной 5 мм. К основанию крепится подшипник, датчик энкодера, двигатель дальномера и маленькая печатная плата. Само основание устанавливается на любую подходящую поверхность при помощи стоек.
Вот так выглядит основание дальномера снизу:
Печатная плата содержит регулируемый линейный стабилизатор напряжения для питания двигателя, и площадки для подключения проводов узла щеток. Сюда же подводится питание дальномера.
Как и в других дальномерах, двигатель вращает сканирующую головку при помощи пассика. Для того, чтобы он не сваливался с втулки, на ней имеется специальное углубление.
Как видно из фотографии, подшипник закреплен в основании при помощи трех винтов. На сканирующей головке подшипник удерживается за счет выступа на втулке и прижимается к ней другими винтами, одновременно удерживающими щеточный узел.
Энкодер состоит из бумажного диска с напечатанными рисками и оптопары с фототранзистором, работающей на отражение. Оптопара закреплена при помощи стойки на основании так, что плоскость диска оказывается рядом с ней:

Сигнал от оптопары через щетки передается на вход компаратора микроконтроллера. В качестве источника опорного напряжения для компаратора выступает ЦАП микроконтроллера.
Для того, чтобы дальномер мог определить положение нулевого угла, на диск энкодера нанесена длинная риска, отмечающая нулевое положение головки (она видна справа на фотографии выше).
Вот так выглядит собранный дальномер:
Вид сверху:
Разъем сзади дальномера используется для прошивки микроконтроллера.
Для балансировки сканирующей головки на нее спереди устанавливается крупная гайка — она практически полностью устраняет вибрацию при вращении головки.
Собранный дальномер нужно отюстировать — установить лазер в такое положение, чтобы отраженный от объектов свет попадал на фотоприемную линейку. Обе пластмассовые детали содержат соосные отверстия, располагающиеся под пазом лазера. В отверстия вворачиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, можно изменять наклон лазера.
Наблюдая в программе на компьютере форму и амплитуду принятого сигнала и изменяя наклон лазера, нужно добиться максимальной амплитуды сигнала.
Также триангуляционные дальномеры требуют проведения калибровки, о чем я писал ранее:
Для того, чтобы при помощи датчика можно было измерять расстояние, нужно произвести его калибровку, т.е. определить закон, связывающий результат, возвращаемый датчиком, и реальное расстояние. Сам процесс калибровки представляет собой серию измерений, в результате которых формируется набор расстояний от датчика до некоторого объекта, и соответствующих им результатов.
В данном случае калибровка представляла собой серию измерений расстояний до различных объектов самодельным дальномером и лазерной рулеткой, после чего по полученным парам измерений выполняется регрессионный анализ и составляется математическое выражение.
Получившийся дальномер имеет существенный недостаток — из-за отсутствия модуляции излучения лазера он некорректно работает при любой сильной засветке. Обычное комнатное освещение (даже при использовании мощной люстры) не влияет на работу дальномера, но вот расстояние до поверхностей, прямо освещенных Солнцем, дальномер измеряет неправильно. Для решения этой проблемы в состав дальномера нужно включить интерференционный светофильтр, пропускающий световое излучение только определенной длины волны — в данном случае 780 нм.
Эволюция самодельных дальномеров:

Габаритные размеры получившегося дальномера:
Размер основания: 88×110 мм.
Общая высота дальномера: 65 мм (может быть уменьшена до 55 при уменьшении высоты стоек).
Диаметр сканирующей головки: 80 мм (как у mini-CD диска).
Как и у любого другого триангуляционного дальномера, точность измерения расстояния этого дальномера резко падает с ростом расстояния.
При измерениях расстояния до объекта с коэффициентом отражения около 0.7 у меня получились примерно такие точностные характеристики:
| Расстояние | Разброс |
|---|---|
| 1 м | <1 см |
| 2 м | 2 см |
| 5 м | 7 см |
Стоимость изготовления дальномера:
| DIY, $ | Опт., $ | |
|---|---|---|
| Основание | ||
| Пластина основания | 1,00 | 0,50 |
| Двигатель | 0,00 | 1,00 |
| Подшипник | 1,50 | 1,00 |
| Щеточный узел | 7,50 | 5,00 |
| Крепежные детали | 0,00 | 2,00 |
| Сканирующая головка | ||
| Контроллер STM32F303CBT6 | 5,00 | 4,00 |
| Фотоприемная линейка | 18,00 | 12,00 |
| Остальная электроника | 4,00 | 3,00 |
| Плата | 1,50 | 0,50 |
| Объектив | 2,00 | 1,50 |
| Держатель объектива | 1,00 | 0,50 |
| Лазер | 1,00 | 0,80 |
| Пластиковые детали | 3,00 | 2,00 |
| Крепежные детали | 0,00 | 1,00 |
| Сборка | 0,00 | 20,00 |
| Итого: | 45,50 | 54,80 |
В первой колонке — во сколько дальномер обошелся мне, во второй — сколько он мог бы стоить при промышленном изготовлении (оценка очень приблизительная).
Программная часть дальномера
Перед написанием программы нужно рассчитать тактовую частоту, на которой будет работать фотоприемная линейка.
В старых версиях дальномера частота сканирования была ограничена 3 Гц, в новом дальномере я решил сделать ее выше — 6Гц (это учитывалось при выборе линейки). Дальномер делает 360 измерений на один оборот, так что при указанной скорости он должен быть способен производить 2160 измерений в секунду, то есть одно измерение должно занимать менее 460 мкс. Каждое измерение состоит из двух этапов — экспозиция (накопление света линейкой) и считывание данных с линейки. Чем быстрее будет произведено считывание сигнала, тем длиннее может быть время экспозиции, а значит, и тем больше будет амплитуда сигнала. При тактовой частоте линейки 8 МГц время считывания 1024 пикселей будет составлять 128 мкс, при 6 МГц — 170 мкс.
При тактовой частоте микроконтроллера серии STM32F303 в 72 МГц максимальная частота выборок АЦП — 6 MSPS (при разрядности преобразования 10 бит). Так как я хотел проверить работу дальномера при тактовой частоте линейки 8 МГц, я решил использовать режим работы АЦП, в котором два АЦП работают одновременно (Dual ADC mode — Interleaved mode). В этом режиме по сигналу от внешнего источника начала запускается ADC1, а затем, через настраиваемое время, ADC2:

Как видно из диаграммы, суммарная частота выборок АЦП в два раза выше, чем частота триггера (в данном случае это сигнал от таймера TIM1).
При этом TIM1 также должен формировать сигнал тактовой частоты для фотоприемной линейки, синхронный с выборками АЦП.
Чтобы получить с одного таймера два сигнала с частотами, различающимися в два раза, можно переключить один из каналов таймера в режим TIM_OCMode_Toggle, а второй канал должен формировать обычный ШИМ сигнал.
Структурная схема программы дальномера:
Ключевой частью программы является именно захват данных с линейки и управление ей. Как видно из схемы, этот процесс идет на аппаратном уровне, за счет совместной работы TIM1, ADC1/2 и DMA. Для того, чтобы время экспозиции линейки было постоянным, используется таймер TIM17, работающий в режиме Single Pulse.
Таймер TIM3 генерирует прерывания при срабатывании компаратора, соединенного с энкодером. За счет этого рассчитывается период вращения сканирующей головки дальномера и ее положение. По полученному периоду вращения рассчитывается период таймера TIM16 таким образом, чтобы он формировал прерывания при повороте головки на 1 градус. Именно эти прерывания служат для запуска экспозиции линейки.
После того, как DMA передаст все 1024 значения, захваченные ADC, в память контроллера, программа начинает анализ эти данных: сначала производится поиск положения максимума сигнала с точностью до пикселя, затем, при помощи алгоритма поиска центра тяжести — с более высокой точностью (0.1 пикселя). Полученное значение сохраняется в массив результатов. После того, как сканирующая головка сделает полный оборот, в момент прохождения нуля этот массив предаются в модуль UART при помощи еще одного канала DMA.
Использование дальномера
Качество работы этого дальномера, как предыдущих, проверялось при помощи самописной программы. Ниже пример изображения, формируемого этой программой в результате работы дальномера:
Однако дальномер делался не для того, чтобы просто лежать на столе — он был установлен на старый пылесос Roomba 400 вместо дальномера второй версии:
Также на роботе установлен компьютер Orange Pi PC, предназначенный для управления роботом и связи с ним.
Как оказалось, из-за большой просадки напряжения на линейном источнике питания двигателя дальномера, для работы на скорости 6 об/сек дальномеру требуется питающее напряжение 6В. Поэтому Orange Pi и дальномер питаются от отдельных DC-DC преобразователей.
Для управления роботом и анализа данных от дальномера я использую ROS.
Данные от дальномера обрабатываются специальным ROS-драйвером (основанном на драйвере дальномера Neato), который получает по UART данные от дальномера, пересчитывает их в расстояния до объектов (используя данные калибровки) и публикует их в стандартном формате ROS.
Вот так выглядит полученная информация в rviz (программа для визуализации данных ROS), робот установлен на полу:
Длина стороны клетки — 1 метр.
После того, как данные попали в ROS, их можно обрабатывать, используя уже готовые пакеты программ. Для того, чтобы построить карту квартиры, я использовал hector_slam. Для справки: SLAM — метод одновременного построения карты местности и определения положения робота на ней.
Пример получившейся карты квартиры (форма несколько необычна, потому что дальномер «видит» мебель, а не стены, и не все комнаты показаны):
ROS позволяет объединять несколько программ («узлов» в терминологии ROS), работающих на разных компьютерах, в единую систему. Благодаря этому, на Orange Pi можно запускать только ROS-драйверы Roomba и дальномера, а анализ данных и управление роботом вести с другого компьютера. При этом эксперименты показали, что hector_slam нормально работает и на Orange Pi, приемлемо загружая процессор, так что вполне реально организовать полностью автономную работу робота.
Система SLAM благодаря данным от дальномера позволяет роботу определять свое положение в пространстве. Используя данные о положении робота и построенную карту, можно организовать навигационную систему, позволяющую «направить» робота в указанную точку на карте. ROS содержит в себе пакет программ для решения этой задачи, но, к сожалению, я так и не смог заставить его качественно работать.
Видео работы дальномера:
Более подробное видео построения карты при помощи hector_slam:
Исходные коды программы контроллера
Автор: iliasam
Источник
www.pvsm.ru
Лазерный дальномер
Добрый день, уважаемые читатели. Сегодня обзор полезного инструмента для стрелка — лазерного дальномера, измерителя расстояния до 600 м.Продолжаю серию обзоров аксессуаров для пневматической винтовки.
Дальномеры в китайшопах продаются нескольких типов:
Только для гольфа (на оптическом принципе):

Измерители для ремонта:

Так вот для стрельбы они не подходят. Нужен дальномер с оптическим наведением на цель, по типу бинокля. Такую модель мы и рассмотрим:
Скучная физика. Принцип работы
Измерение дальности охотничьим лазерным дальномером.Способность электромагнитного излучения распространяться с постоянной скоростью дает возможность определять дальность до объекта. Так, при импульсном методе дальнометрирования используется следующее соотношение:
L = ct/2,
— где L — расстояние до обьекта,
— с — скорость распространения излучения,
— t — время прохождения импульса до цели и обратно.
Рассмотрение этого соотношения показывает, что потенциальная точность измерения дальности определяется точностью измерения времени прохождения импульса энергии до объекта и обратно. Ясно, что чем короче импульс, тем лучше.
Задача определения расстояния между дальномером и целью сводится к измерению соответствующего интервала времени между зондирующим сигналом и сигналом, отраженным от цели. Различают три метода измерения дальности в зависимости от того, какой характер модуляции лазерного излучения используется в дальномере: импульсный, фазовый или фазо-импульсный.
Сущность импульсного метода дальнометрирования состоит в том, что к объекту посылают зондирующий импульс, он же запускает временной счетчик в дальномере. Когда отраженный объектом импульс приходит к дальномеру, то он останавливает работу счетчика. По временному интервалу (задержке отраженного импульса) определяется расстояние до объекта.
При фазовом методе дальнометрирования лазерное излучение модулируется по синусоидальному закону с помощью модулятора (электрооптического кристалла, изменяющего свои параметры под воздействием электрического сигнала). Обычно используют синусоидальный сигнал с частотой 10…150 МГц (измерительная частота). Отраженное излучение попадает в приемную оптику и фотоприемник, где выделяется модулирующий сигнал. В зависимости от дальности до объекта изменяется фаза отраженного сигнала относительно фазы сигнала в модуляторе. Измеряя разность фаз, определяют расстояние до объекта.
Упаковка, коробка
Покупал в магазине TOMTOP на ebay, вот он на их сайте напрямую.
Где может пригодится дальномер: Для стрельбы, охоты, туризма, спорта. Я брал для стрельбы, для точного определения поправок на дальность в баллистическом калькуляторе.
Характеристики:
Диапазон измерения расстояния: 5 — 600 м
Диапазон измерения угла: +-60° (для модели с индексом А)
Точность измерения: ±1 м
Длина волны лазера: 905 нм
Сертификат безопасности: FDA(CFR 21)
Поле зрения: 7°
Увеличение: 6X
Диаметр объектива: 24 мм
Диаметр выходного зрачка: 3.8 мм
Диоптрийная подстройка: ±3 Д
Ручная фокусировка
Рабочая температура: 0°~ 40°
Измерение высоты
Режим сканирования
Режим гольф
Батарея: 3V CR2
Размеры: 10.5 * 7.5 * 4 см
Масса: 181 г.
Комплектация:
Дальномер, чехол, ремешок на руку, тряпочка для протирки оптики, инструкция, гарантийка.
Сам дальномер поближе:


есть резьбовое отверстие под штатив, полезное дополнение.
диоптрийная настройка происходит вращение окуляра.
Вот так лежит в руке:
Черное — покрытие «софттач», что бы не скользил. И конечно лучше одевать ремешок, так как падение на асфальт дальномер вряд ли переживет.
Батарейка:

Форм-фактор 15270. Вот например аккумы с зарядником сразу.
Инструкция

Масса с батарейкой и чехлом:

Работа:
Сверху две кнопки: включение и режим, замер происходит при нажатии на кнопку включения, режим переключает режимы (в данном случае толь метры или ярды).
Наводим перекрестье на нужный объект — нажимаем кнопку — видим в окуляре результат.
Смотреть в него примерно как в шести кратный монокуляр.

Минимум 5 м, максимум 611 у меня получилось. Больше чем на 100 м целится тяжело в мелкие предметы. Через стекло берет через раз.
Ярды

Косвенная проверка точности:

по карте:
Резюмируя:
Сам дальномер мне понравился, к качеству изготовления и измерениям у меня претензий нет.
Но вот, не смотря на картинки в лоте, функция измерения угла отсутствует (мне прислали модель без индекса «А»). Толи ошиблись в магазине, то ли имеет место намеренный обман, я буду разбираться. Я выбирал модель именно с угломером, модель без угломера можно найти и подешевле.
Еще мои обзоры по этой теме
Спасибо за внимание! Метких выстрелов!
mysku.ru