Шаговый переключатель серый SB (#82082) — Reimo.ru
Шаговый переключатель серый SB (оригинальное название — Trittstufenschalter grau SB) в наличии в интернет-магазине Reimo.ru по цене 1 601 ₽. Комплектация, характеристики, спецификации и внешний вид Шаговый переключатель серый SB могут отличаться от заявленных. Перед покупкой уточняйте необходимые параметры товара у наших менеджеров. Другие товары бренда CBE можно посмотреть в каталоге на нашем сайте.Артикульный номер товара 82082 поможет вам, если вы ищите или выбираете товары, похожие на Шаговый переключатель серый SB по доступной цене и с доставкой. Обязательно взгляните на Протектор электрический, или ознакомьтесь со всеми разделами интернет-магазина для автопутешественников Reimo.ru на этой странице, чтобы отыскать необходимые запчасти, аксессуары или дополнительное оборудование для вашего автодома, прицепа-дачи или кемпера.
Этим предложением интересовались 146 человек за последнее время.
Reimo — крупнейший немецкий каталог товаров для автодомов, прицепов-дач, караванинга и автопутешествий с доставкой по всей России и странам СНГ. Информация, указанная на сайте Reimo.
Шаговый переключатель — Справочник химика 21
III — рабочее напряжение — напряжение управления й, — Вв — сопротивление разряда С — конденсатор. 1 — команды управления 2 — шаговый переключатель з — реле. [c.389] На этом принципе могут быть построены простые схемы реле времени, которые периодически одно за другим дают один и тот же интервал времени. Для программирования различных функций после реле времени включается шаговый переключатель, отдающий в определенной последовательности команды устройствам для выполнения отдельных операций. Длительность заряда или разряда конденсатора в соответствии с программой задается
Принципиальная схема такого программного устройства представлена на рис.
 31. Здесь 2 С-элементы находятся в цепи сетки электронной лампы, анодный ток которой включает оба реле. От величины сопротивления, включенного параллельно обмотке реле, зависит время задержки включения. Контакты реле заряжают конденсатор ЛС-цепи, приводят в действие шаговый переключатель и передают команды анализатору. Через одну группу контактов шагового переключателя к конденсатору подключаются соответствующие программе сопротивления разряда. Другие группы контактов [c.391]
31. Здесь 2 С-элементы находятся в цепи сетки электронной лампы, анодный ток которой включает оба реле. От величины сопротивления, включенного параллельно обмотке реле, зависит время задержки включения. Контакты реле заряжают конденсатор ЛС-цепи, приводят в действие шаговый переключатель и передают команды анализатору. Через одну группу контактов шагового переключателя к конденсатору подключаются соответствующие программе сопротивления разряда. Другие группы контактов [c.391]Шт — штифты на вращающемся диске Д — фотоэлектрический детектор или детектор сближения на основе изменения магнитного сопротивления У — усилитель ШП — шаговый переключатель УЯО— усилители индивидуальных операций >/0 — индивидуальные операции [c.123]
Питание шагового переключателя 3 осуществляется от автотрансформатора 4. На выходе автотрансформатора устанавливается напряжение 25 в по шкале вольтметра переменного тока 5. Разарретировав микроамперметр [c.76]
Нажимая кнопку 11, устанавливают шаговый переключатель на отметку 1—27 его шкалы. При этом в измерительную цепь включается образец № 1. Ручку-указатель шунта микроамперметра поворачивают по ходу часовой стрелки, постепенно увеличивая сопротивление, и находят ее оптимальное положение, при котором достигается необходимая точность измерения. [c.76]
При этом в измерительную цепь включается образец № 1. Ручку-указатель шунта микроамперметра поворачивают по ходу часовой стрелки, постепенно увеличивая сопротивление, и находят ее оптимальное положение, при котором достигается необходимая точность измерения. [c.76]
Блок управления модели 520 фирмы Be kman Instruments , представленный на рис. 29, работает лишь с одним программным диском. Момент включения различных операций определяется с помош ью штифтов, которые могут устанавливаться в любом положении на программном диске. Программный диск приводится в движение электромотором. Штифты один за другим в соответствии с установленной программой приводят в действие устройство, управляющее шаговым переключателем, отдающим отдельные приказы на щит управления прибора. После каждого оборота программного диска шаговый переключатель с помощью особого сигнала возвращается в исходное положение. Число возможных операций определяется шаговым переключателем.
Многоэлементные спектрометры прямого счета могут давать большое число аналитических данных для одного образца. Поэтому при массовом анализе на обработку результатов измерений затрачивается значительное время. В таких случаях автоматическая обработка данных является экономически целесообразной. Лоу и Мартин [2] описывают вычислительную систему для обработки результатов, получаемых на квантометре фирмы «ARL». Эта система предназначена для лаборатории, систематически выполняюшей анализы металлов в образцах нефти. Квантометр имеет 25 аналитических каналов и может контролировать 51 аналитическую линию. Результаты регистрируются на самописце фирмы «Leeds and Northrup», преобразование аналогового сигнала в цифровой код осушествляется с помощью шифратора, соединенного с самописцем. Вычислительная система включает также дистанционно управляемый пробойник перфокарт (IBM 526), маркер бумажной ленты и специальный выносной пульт с цифровой индикацией. Обработка данных, поиск и расчет выполняются на вычислительной машине IBM 360Д5. Выбор группы исследуемых элементов осуществляется с помощью соответствующего переключателя на контрольной панели.
Поэтому при массовом анализе на обработку результатов измерений затрачивается значительное время. В таких случаях автоматическая обработка данных является экономически целесообразной. Лоу и Мартин [2] описывают вычислительную систему для обработки результатов, получаемых на квантометре фирмы «ARL». Эта система предназначена для лаборатории, систематически выполняюшей анализы металлов в образцах нефти. Квантометр имеет 25 аналитических каналов и может контролировать 51 аналитическую линию. Результаты регистрируются на самописце фирмы «Leeds and Northrup», преобразование аналогового сигнала в цифровой код осушествляется с помощью шифратора, соединенного с самописцем. Вычислительная система включает также дистанционно управляемый пробойник перфокарт (IBM 526), маркер бумажной ленты и специальный выносной пульт с цифровой индикацией. Обработка данных, поиск и расчет выполняются на вычислительной машине IBM 360Д5. Выбор группы исследуемых элементов осуществляется с помощью соответствующего переключателя на контрольной панели.
 176]
176]
В автоматических титраторах прерывистого действия станции управления представляют собой более сложные устройства, имеющие импульсаторы, селекторные (шаговые) переключатели, систему реле. [c.33]
Выходной сигнал детектора управляет шаговы.м искателем, определяющим последовательность переключений. Фирма Веск-man-Muni h установила электромеханический шаговый переключатель. В программаторе фирмы Servomex использован полупроводниковый 64-ступенчатый шаговый переключатель. Для выбора необходимого порядка переключений, соответствующих каждому положению шагового переключателя, можно также применить диодную коммутационную панель или аналогичные устройства. [c.122]
Добавление элементов управления в ячейки в Numbers на Mac
Вы можете добавить всплывающее меню к ячейке, а затем указать элементы, отображаемые во всплывающем меню.
Numbers воспринимает элементы меню, которые являются числовыми значениями, в том числе даты и значения длительности, а также текст. Формулы могут обращаться к ячейкам, для которых всплывающее меню настроено на числовой вариант.
Формулы могут обращаться к ячейкам, для которых всплывающее меню настроено на числовой вариант.
Выберите ячейки, которые нужно отформатировать.
В боковой панели «Формат» нажмите вкладку «Ячейка».
Нажмите всплывающее меню «Формат данных» и выберите требуемый вариант.
Если хотя бы часть выбранных ячеек содержит данные, то пункты всплывающего меню предварительно заполняются значениями из выбранных ячеек. Список может содержать до 250 ячеек (флажки интерпретируются как слова «истина» и «ложь», а рейтинги воспринимаются как числовые значения от 0 до 5). При желании Вы можете отредактировать эти пункты. Повторяющиеся значения в выбранных ячейках обрабатываются как один пункт всплывающего меню. Всплывающее меню в каждой ячейке настраивается на исходное значение ячейки.
Если все выбранные ячейки пусты, во всплывающем меню присутствуют только элементы-заполнители (например, «Элемент 1»).
В появившемся списке пунктов под элементом «Всплывающее меню» дважды нажмите элемент (предварительно заполненное значение или заполнитель), а затем введите текст, который должен отображаться во всплывающем меню.

Повторите эту процедуру для каждого элемента, который хотите изменить.
Чтобы добавить во всплывающее меню еще один пункт, нажмите под списком вариантов и введите текст, который должен отображаться как пункт меню.
Вы можете добавить до 250 пунктов всплывающего меню.
Укажите способ отображения всплывающего меню.
Перенос пункта в другое место в меню. Перетяните его вниз или вверх в списке пунктов меню.
Задание настройки, чтобы ячейки, в которых не сделан выбор, оставались пустыми. Выберите «Начать с нового» во всплывающем меню под списком пунктов.
Задание настройки, чтобы в ячейках, в которых не сделан выбор, по умолчанию отображался первый пункт меню. Выберите «Начинать с пустого» во всплывающем меню.
Удаление пункта меню. Нажмите его, затем нажмите .

При навигации по таблице можно выбрать ячейку с всплывающим меню, нажать клавишу пробела, чтобы открыть меню, затем с помощью стрелок выбрать нужную опцию и снова нажать клавишу пробела, чтобы выбрать значение.
Скупка переключателей в Новосибирске дорого
Показать: 15255075100
МП12 (круглые ножки)..
П2Г-3 (серебро) (б/у-нов)..
ПГ 2,5,7 (до 02.
ПМ15-1В, ПКБ1-2, ПКБ2-8..
ППК6 (20 ножек)..
ПР 2-5П2НВ (до 02.92г.)..
ПР2-2П4НВ (до 02. 92г.)..
92г.)..
ПТ8-1В(2,5) (жел. нож.) 1В(бел. нож.)..
ТВ 1-2 (1,4), ПК2Э-2В, ПКн2-1В, 9В..
Шаговые переключатели, реохорды..
ШИВ 25,50 (+контакты Pt)..
Показано с 1 по 15 из 15 (всего 1 страниц)
Скупка переключателей
Компания «АНОД» осуществляет скупку новых и б/у переключателей различных видов и в любых объёмах. Работаем на рынке скупки радиоэлектронных компонентов уже долгое время, заслужили кредит доверия у клиентов. Предлагаем выгодные условия продажи неработающих, неликвидных переключателей — быстрая оценка и лучшие цены в Новосибирске.
Работаем на рынке скупки радиоэлектронных компонентов уже долгое время, заслужили кредит доверия у клиентов. Предлагаем выгодные условия продажи неработающих, неликвидных переключателей — быстрая оценка и лучшие цены в Новосибирске.
Ценность переключателей
Практически все переключатели содержат драгоценные металлы — платину, золото, серебро или палладий. Драгметаллы использовались для уменьшения электрического сопротивления. Мы покупаем переключатели для последующей утилизации и выделения из них драгметаллов. Наиболее дорогими в скупке являются, изготовленные до 1991 года. У них контактное кольцо из золота и палладиевого сплава.
Наши преимущества
Нам можно сдать б/у и новые переключатели любого типа, размеров и модификации: поворотные, пакетные, рычажные, модульно-движковые, кнопочные, микропереключатели и переключатели от контрольно-регистрирующих приборов и др. Стоимость каждого определяется примерным количеством содержащихся ценных металлов.
Почему переключатели выгодней сдавать в скупку «АНОД»
- Гарантия честной оценки! Мы заинтересованы, чтобы каждый клиент возвращался к нам снова.
- За счёт значительных объёмов товарооборота мы имеем возможность предложить самую выгодную цену на неликвидные и б/у переключатели.
- Быстрая оценка — эксперт сразу осмотрит и сообщит точную стоимость за 1 штуку и за весь объём.
- География нашей деятельности — Новосибирск и весь регион.
- Скупка переключателей в любых объёмах у частных лиц, фирм, офисных центров, складов и других организаций с любой формой собственности.

Шаговый двигатель экскаватора (S6D95 ПК200-5)
Основная Информация.
Номер Моделя.
S6D95 PC200-5
Принцип
Вихревой Ток
Код ТН ВЭД
8401200000
Описание Продукции
Части землечерпалки запасные: STEPPER МОТОР S6D95 PC200-5ГУСЕНИЦА, Volvo, KOMATSU, ХИТАЧИ, KOBELCO, KATO, SUMITOMO, HYUNDAI, DOOSAN, DAEWOO, электронные части: Клапан соленоида, датчик, датчик температуры воды, переключатель дросселя, переключатель давления, старт переключателя.
УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Двигатели постоянного тока нашли множество применений, но непрерывное и плавное вращение ротора не всегда требуется. Естественная особенность двигателя BLDC, заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. Их ротор может вращаться с определенными приращениями и оставаться стабильным в этих состояниях даже если управление прерывается. Возобновление подачи напряжения на катушки вызывает продолжение вращения.
Естественная особенность двигателя BLDC, заключающаяся в том, что для его вращения необходимо постоянно переключать напряжения между обмотками, способствовала развитию шаговых двигателей. Их ротор может вращаться с определенными приращениями и оставаться стабильным в этих состояниях даже если управление прерывается. Возобновление подачи напряжения на катушки вызывает продолжение вращения.
Шаговые двигатели не имеют коммутаторов и щеток. Это синхронные двигатели постоянного тока с электронно-коммутируемым магнитным полем, вызывающим вращение якоря (его магнитов). Можно считать, что шаговые двигатели управляются цифровыми импульсами, и в шаговом двигателе полный угол поворота ротора разделен на дискретное количество шагов. Количество этих ступеней (фаз) равно количеству магнитов, расположенных вокруг центрального сердечника.
Конструкция шагового двигателя
Теория работы шаговых двигателей. В отличие от двигателей постоянного или переменного тока, для шаговых двигателей требуется последовательное питание, то есть они должны получать фиксированную последовательность импульсов для отдельных катушек. Также бывают биполярные и униполярные двигатели. Униполярный шаговый двигатель отличается от биполярного тем, что имеет дополнительный отвод обмотки, который разделяет обмотку на две части. Обычно биполярный шаговый двигатель имеет 4 или 8 контактов, а униполярный — 5 или 6 контактов.
Также бывают биполярные и униполярные двигатели. Униполярный шаговый двигатель отличается от биполярного тем, что имеет дополнительный отвод обмотки, который разделяет обмотку на две части. Обычно биполярный шаговый двигатель имеет 4 или 8 контактов, а униполярный — 5 или 6 контактов.
Схема униполярных и биполярных шаговых двигателей
Вначале рассмотрим униполярный шаговый двигатель, ввиду простоты управления. В таком моторе ток в обмотке всегда течет в одном направлении. Это упрощает метод управления, в отличие от биполярного, где управление должно обеспечивать изменение полярности катушек шагового двигателя путем изменения направления тока через обмотку на противоположное.
Двух переключателей достаточно, чтобы построить простейший драйвер шагового двигателя, как показано на рисунке. Здесь используем 6-проводный униполярный двигатель. Также можно сказать, что двигатель в этом случае управляется однополярно, за счет использования средней обмотки катушки и постоянного напряжения питания на нее.
Переключая данные переключатели в последовательности S1, S2, S1, S2, S1, S2… заметим, что двигатель вращается. Рисунок выше иллюстрирует важный принцип управления: обе обмотки не могут питаться от одной пары одновременно. Каждое изменение переключателя поворачивает ротор на один шаг. Чем быстрее начнем переключать переключатели в последовательности S1, S2, S1, S2…, тем быстрее начнет вращаться ротор.
Подключение переключателей к катушкам шагового двигателя
Скорость шагового двигателя зависит не от величины напряжения, а от скорости подключения питания к отдельным обмоткам. Чтобы добиться полного вращения ротора с 200-шаговым двигателем, надо изменить положение каждого переключателя 100 раз, то есть выполнить до 200 последовательностей для двух переключателей. Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
В нашем случае последовательность переключений также определяет направление вращения шагового двигателя. Когда меняем последовательность включения переключателей, то меняем и направление вращения, например S2, S1, S2, S1, S2, S1… влево, S1, S2, S1, S2, S1, S2… вправо. В этом примере есть двухпозиционные переключатели, которые всегда обеспечивают питание двух из четырех обмоток шагового двигателя в данный момент. Но использование трехпозиционных переключателей дает гораздо больше возможностей.
Опять же, обе обмотки никогда не питаются от одной пары, что является обязательным принципом управления шаговым двигателем. Благодаря трехпозиционным переключателям можно реализовать, например, полушаговое управление, благодаря разнообразию переключений. Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
На практике вместо переключателей используются биполярные транзисторы, чаще можно встретить драйверы на основе полевых МОП-транзисторов, благодаря возможности пропускания большего тока, а также возможности их перегрузки.
 Транзистор здесь действует как переключатель, он либо закрыт, либо полностью открыт.
Транзистор здесь действует как переключатель, он либо закрыт, либо полностью открыт.Упрощенная схема управления униполярным шаговым двигателем
Чтобы управлять таким мотором, надо обеспечить соответствующую последовательность импульсов. Например, только одна из четырех обмоток шагового двигателя находится под напряжением одновременно (это своего рода волновое управление). На каждый цикл двигателя подается питание на одну из четырех катушек униполярного шагового двигателя. Вращение его будет выглядеть так:
Вращение униполярного шагового двигателя в последовательных тактах цикла управления волной
Управляющая последовательность A +, B +, A-, B- повторяется каждые четыре импульса тактового генератора. Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Последовательность импульсов A +, B +, A -, B — вращает двигатель в одном направлении.
 Смена полюсов статора (N, S) заключается в питании соответствующей катушки (A + или A -).
Смена полюсов статора (N, S) заключается в питании соответствующей катушки (A + или A -). Самый простой способ изменить направление — поменять местами одну пару проводов катушки (поменять местами, например, B + с B — и B — с B +), затем дадим последовательность A +, B -, A -, B + импульсы, он вращает двигатель в противоположном направлении. Так управление направлением реализовано в некоторых контроллерах шаговых двигателей. Самый простой способ изменить последовательность импульсов — использовать, например, реле.
Форма волны (однофазная) импульсная последовательность драйвера
Упрощенная схема однофазного (волнового) регулятора с изменением направления вращения
Несомненное преимущество униполярных шаговых двигателей — простота управления. Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
Двухфазное управление шаговым мотором
Гораздо лучшей альтернативой однофазному управлению будет двухфазное, при котором работают две из четырех обмоток шагового двигателя. В таком управлении используем 1/2 всех обмоток. Тогда мотор станет более эффективен.
Вращение двигателя при двухфазном полноступенчатом управлении
Две катушки шагового двигателя всегда находятся под напряжением. Опять же, мы никогда не питаем две катушки из одной пары одновременно. С каждым импульсом от генератора переключается только одна катушка из отдельных пар (последовательно). В первом цикле катушки A и B находятся под напряжением, во втором катушка A все еще находится под напряжением, в то время как катушка B переключается на B +, в третьем цикле катушка B + находится под напряжением из второго цикла, и катушка A переключается на A + и так далее.
Двухфазная последовательность управляющих импульсов
Формы сигналов A + и B + сдвинуты друг к другу (две из четырех обмоток всегда работают в заданном цикле), а сигналы A + и B- инвертируются с сигналами A + и B +. Такие формы сигналов (смещенные относительно друг друга) легко генерируются, например, благодаря интегральной микросхеме 4013, которая имеет два D-триггера. Также можно использовать микроконтроллер. Изменение направления вращения в таком контроллере, как и при однофазном (волновом) управлении, может быть реализовано путем изменения направления проводов одной пары концов катушки (изменение с A + на A — и A — на A +). Чаще всего изменение скорости основано на изменении логики последовательности управляющих импульсов. Мы можем сделать это, например, используя логические элементы XOR, которые будут отрицать сигналы (инвертировать их).
Такие формы сигналов (смещенные относительно друг друга) легко генерируются, например, благодаря интегральной микросхеме 4013, которая имеет два D-триггера. Также можно использовать микроконтроллер. Изменение направления вращения в таком контроллере, как и при однофазном (волновом) управлении, может быть реализовано путем изменения направления проводов одной пары концов катушки (изменение с A + на A — и A — на A +). Чаще всего изменение скорости основано на изменении логики последовательности управляющих импульсов. Мы можем сделать это, например, используя логические элементы XOR, которые будут отрицать сигналы (инвертировать их).
Упрощенная схема двухфазного контроллера с изменением направления вращения, D-триггерами для создания смещенных сигналов и логическими вентилями XOR
Оба типа управления представленные выше: однофазный (волновой) и двухфазный (инвертированные сигналы, управляющие транзисторами), в просторечии, являются униполярными типами управления, потому что используем униполярные шаговые двигатели с дополнительными ответвлениями обмотки. Также в биполярных шаговых двигателях, где работает вся обмотка, мы встречаемся с однофазным и двухфазным управлением, там идея работы аналогична.
Также в биполярных шаговых двигателях, где работает вся обмотка, мы встречаемся с однофазным и двухфазным управлением, там идея работы аналогична.
Также стоит упомянуть моторы VR (реактивного сопротивления). Двигатели VR обычно имеют три обмотки. Чтобы управлять таким двигателем, нам нужно подавать отдельные обмотки одну за другой в последовательности A, B, C, A, B, C… это заставит двигатель вращаться в одном направлении, в то время как последовательность питания обмотки A, C, B, A, C, B… заставит его вращаться в противоположном направлении. Самый простой способ изменить направление — поменять местами концы двух обмоток шагового двигателя VR, и проще всего это сделать с помощью реле.
Упрощенная схема драйвера резистивного шагового двигателя
Последовательность импульсов управления шаговым двигателем
Последовательность импульсов драйвера реактивного шагового двигателя очень похожа на волновое управление.
Биполярное управление обеспечивает более эффективное использование шагового двигателя, при котором всегда работает вся обмотка шагового двигателя, что дает гораздо лучшую производительность на низких и средних скоростях. А крутящий момент примерно на 30 — 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
А крутящий момент примерно на 30 — 40% больше. Но для этого требуется изменить полярность питания катушки, изменив направление тока в обмотках (например поменяв местами концы катушек). Для этого используются два транзисторных моста H (название происходит от сходства с буквой H на схеме), которые состоят из двух ветвей, а каждая ветвь состоит из двух транзисторов. Чаще всего для построения такого моста используются биполярные транзисторы NPN или MOSFET N.
Биполярный драйвер требует более сложного управления из-за того, что нужно управлять каждым из восьми транзисторов индивидуально. Взамен получаем все возможности шагового двигателя, хотя реализация такого типа управления не самая простая.
Принцип работы такого моста основан на том, что если верхний транзистор проводит в одной ветви, а нижний транзистор в другой, и наоборот, то через катушку шагового двигателя будет протекать ток. Если два верхних или два нижних транзистора проводят одновременно в двух ветвях одного моста, то ток через катушку не будет протекать. Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Путем соответствующего управления транзисторами получаем изменение направления тока, протекающего через катушку, и, таким образом, изменение полярности катушки.
Также в биполярных контроллерах имеем дело с однофазным (волновым) и двухфазным управлением. Оба элемента управления являются полношаговыми. При однофазном управлении, как и в униполярных шаговых двигателях, в следующем цикле запитывается только одна катушка,
Вращение биполярного шагового двигателя в последовательных тактах однофазного (волнового) цикла управления
Вращение биполярного шагового двигателя в последовательных тактах двухфазного цикла управления
Упрощенная схема драйвера для биполярных двигателей с транзисторными Н-мостами
Последовательность импульсов для питания катушек идентична униполярному двигателю, но в этом случае нет четырех сигналов на транзисторы, только восемь сигналов на восемь транзисторов. Каждым из них нужно управлять индивидуально, переключая соответствующие транзисторы в нужный момент. Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Ток протекает через катушку, когда один верхний транзистор и один нижний транзистор включены «крест-накрест», то есть 1 и 3 на схеме, другие 2 и 4 в катушке A шагового двигателя закрыты. Но когда выключаем 1 и 3 и включаем 2 и 4, то меняем направление тока в катушке.
Включаем транзисторы «крестом» в катушке A и B. Напряжение питания катушки задается как в униполярном управлении, в то время как «массовый» транзистор подключается крест-накрест к присоединенному верхнему силовому транзистору. Можем если надо изменить скорость, изменив управление двумя концами одной катушки, что приведет к другой последовательности импульсов. Самый простой способ — использовать реле, как при униполярном управлении, также можно реверсировать сигналы, управляющие транзисторами.
Ход управления катушками в биполярном шаговом двигателе волнового управления
Чтобы понять идею, можно сказать что на схеме показано питание проводов биполярного шагового двигателя, т.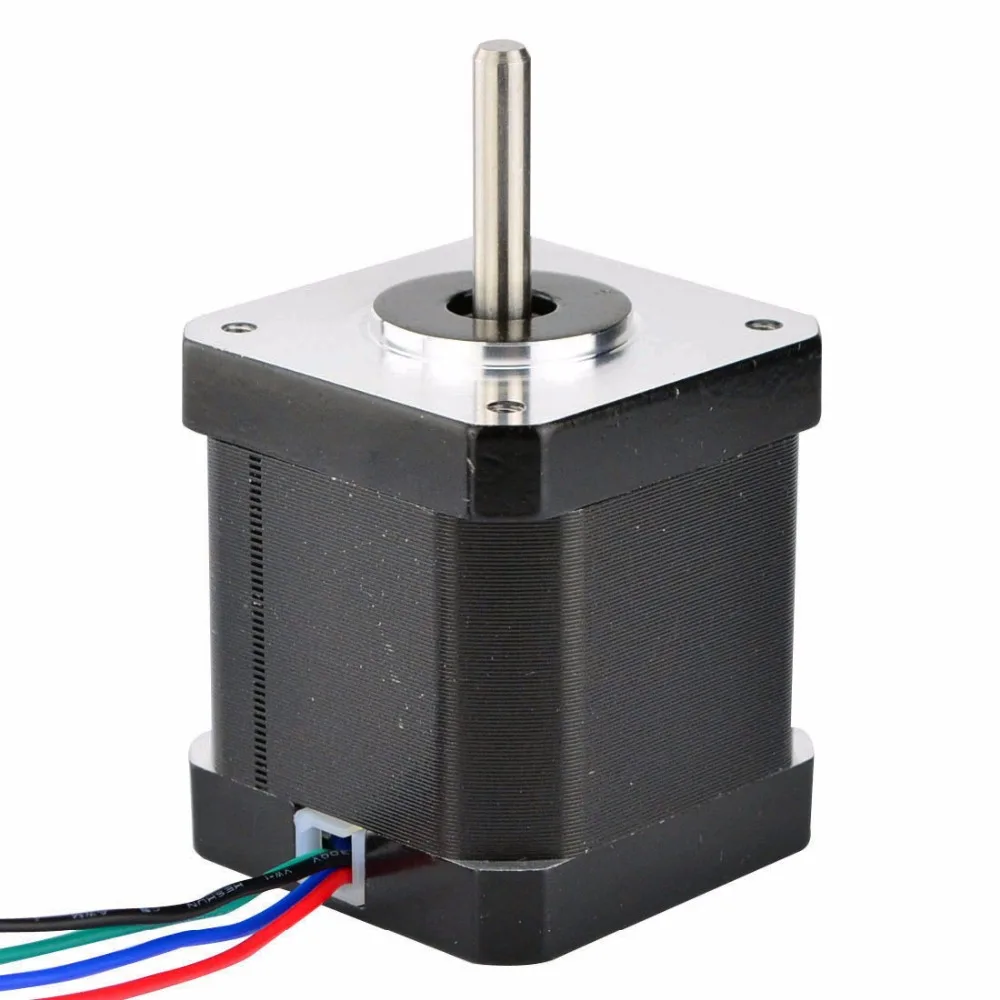 е. высокое состояние означает напряжение на конкретном проводе (A +, B +, A -, B -), а низкое состояние — появление заземления на отдельных проводах в заданном цикле. Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A — питается от генератора, а в третьем A — земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
е. высокое состояние означает напряжение на конкретном проводе (A +, B +, A -, B -), а низкое состояние — появление заземления на отдельных проводах в заданном цикле. Здесь меняем направление тока в катушках, в первом импульсе (в первом цикле) генератор A + земля A — питается от генератора, а в третьем A — земля A + подается, меняя «полярность» источника питания так, чтобы меняли полярность катушек, например N на S.
Фактически, форма сигналов управления транзисторами в H-мосте будет выглядеть как на схеме ниже. Это биполярное однофазное (волновое) управление.
Ход транзисторной последовательности управления в биполярном волновом контроллере
Идея управления катушками двухфазного биполярного двигателя аналогична управлению двухфазным униполярным шаговым мотором. Здесь также нужно управлять каждым транзистором отдельно, как в случае управления биполярной волной. Можем изменить скорость на реле, как при управлении волнами, или использовать логические вентили, меняющие сигналы.
Ход управления катушками в биполярном двигателе двухфазного управления
Эта схема, что касается управления биполярной волной, показывает соответствующий источник питания проводов биполярного шагового двигателя. Низкое состояние означает основное высокое напряжение питания катушки. В первом цикле проводники A — и B — земли A + и B + находятся под напряжением, во втором цикле проводники A — и B + земли A + и B- находятся под напряжением и так далее.
Последовательность импульсов управления транзистором будет выглядеть примерно так:
Последовательность управления транзистором в двухфазном биполярном контроллере
Как правило, биполярные шаговые двигатели требуют сложной схемы управления. Эта проблема была решена с появлением специализированных интегральных схем (A3977, A4988, L297), которые используются для генерации соответствующей последовательности импульсов для управления транзисторами в H-мосте.
Также можем использовать логические элементы или D-триггеры для генерации этой последовательности, но чаще существуют драйверы, построенные на микроконтроллерах или специализированных интегральных схемах.
Самым большим преимуществом управления биполярным шаговым двигателем является хорошо используемый крутящий момент, благодаря тому что вся обмотка находится в текущем состоянии после получения импульса (в течение одного цикла).
Двигатели PM (с постоянным магнитом) и HB (гибридные), несмотря на их различную конструкцию, управляются одинаково. Каждый двигатель с 4 контактами может управляться только биполярно, в то время как униполярный шаговый двигатель с 6 контактами может работать как биполярный, так и униполярный.
Двигатели с 8 выводами дают гораздо больше возможностей, они могут работать как однополярные, так и биполярные. Кроме того, шаговый двигатель можно подключить последовательно, где нужно подавать на него более высокое напряжение, но в то же время он будет потреблять меньше тока, что приведет к снижению мощности на более высоких скоростях.
Также можем подключить его параллельно и запитать от более низкого напряжения, но с более высоким током. Это даст меньше потерь мощности на более высоких скоростях. На низких скоростях, как при последовательном, так и при параллельном подключении, двигатель будет иметь одинаковый крутящий момент (мощность).
На низких скоростях, как при последовательном, так и при параллельном подключении, двигатель будет иметь одинаковый крутящий момент (мощность).
Схема последовательного и параллельного подключения 8-проводного шагового двигателя
Идея последовательного и параллельного подключения также может быть использована с 6-проводным униполярным двигателем.
Схема последовательного и параллельного подключения 6-проводного шагового двигателя
Следует отметить, что при управлении шаговым двигателем мы переключаем обмотки, имеющие некоторую индуктивность. Когда ток прерывается в индуктивности, генерируется напряжение самоиндукции, которое может быть большим и повредить транзистор. Чтобы исключить это явление, необходимо правильно обеспечить протекание тока в катушке даже после выключения транзистора. Наиболее распространены быстродействующие диоды, которые срезают всплески, возникающие при открытии транзистора. Также можете найти драйверы с конденсаторами вместо диодов.
Схема подключения диодов к униполярному драйверу на биполярных транзисторах
Верхние диоды на схеме отсекают положительные импульсы, образовавшиеся в результате отключения тока от катушек шагового двигателя. С другой стороны, нижние диоды тоже нужны, потому что две обмотки одной пары образуют автотрансформатор. Когда в одной катушке есть положительное перенапряжение, отсекаемое верхним диодом, в другой катушке той же пары происходит отсечение отрицательного перенапряжения нижним диодом.
Иная ситуация с использованием MOSFET-транзисторов, потому что транзистор уже имеет в своей структуре переход сток-исток, который в данном случае действует как диод. При использовании небольших двигателей верхние диоды можно не устанавливать. Положительная энергия вывода не очень велика и может быть поглощена транзистором, который кратковременно работает в разрешенном режиме лавинного пробоя и действует как стабилитрон.
Схема униполярного шагового двигателя с MOSFET транзисторами
Также используем тот же принцип для биполярного управления. При использовании MOSFET-транзисторов можем использовать встроенные «диоды» в транзисторе.
При использовании MOSFET-транзисторов можем использовать встроенные «диоды» в транзисторе.
Схема использования диодов в биполярных драйверах
Схема биполярного шагового двигателя с MOSFET транзисторами
Ещё стоит упомянуть инерцию обмоток, ограничивающую скорость нарастания тока. Каждая из катушек шагового двигателя имеет определенную индуктивность L и сопротивление R. После подачи напряжения на катушку ток I определяется напряжением питания катушки (VCC) и ее сопротивлением, то есть I = VCC / R. Он не сразу достигает значения, определяемого L iR. Ток постепенно увеличивается, а постоянная времени нарастания составляет T = L / R. Обычно это 10 мс, поэтому период прямоугольной волны должен составлять 20 мс или 50 Гц, чтобы обеспечить 10 мс высокого состояния длительности импульса для катушки для достижения полного тока.
На низких частотах (скоростях) это значения не имеет, а на более высоких частотах ток не успеет увеличиться до нужного значения. Следовательно, двигатель будет значительно терять крутящий момент при увеличении оборотов, из-за того что ток не успевает увеличиться до номинального тока мотора.
Следовательно, двигатель будет значительно терять крутящий момент при увеличении оборотов, из-за того что ток не успевает увеличиться до номинального тока мотора.
Лучшее решение этой проблемы — подать на двигатель напряжение, намного превышающее номинальное напряжение его работы. Из-за более высокого напряжения ток нарастает быстрее. Правда для этого требуется специальная схема, ограничивающая ток протекающий по обмоткам.
Среди других решений — использование резистора, который выбирается так, чтобы ток в установившемся режиме был равен номинальному току двигателя. Недостатком такой системы являются большие потери мощности на резисторе.
Схема использования резистора для ограничения тока в обмотках шагового двигателя
Иное решение — заменить резисторы на источник тока, который будет поддерживать заданное значение. Сначала на катушку подается высокое напряжение, которое ускоряет нарастание тока, затем источник будет поддерживать заданное значение тока катушки. Правда потери мощности по-прежнему являются большим недостатком, на этот раз на транзисторах, из-за высокого напряжения питания.
Правда потери мощности по-прежнему являются большим недостатком, на этот раз на транзисторах, из-за высокого напряжения питания.
Схема использования источника тока для ограничения тока в обмотках шагового двигателя
Другой способ — работать от двух источников питания. В первые моменты импульса катушка питается от более высокого напряжения, которое ускоряет рост тока, затем она переключается на второй источник с номинальным напряжением питания шагового двигателя.
Недостатком такого решения является необходимость использования двух источников, что связано с дополнительными преобразователями. На схеме ниже переключатели используются для иллюстрации идеи переключения источников напряжения.
Упрощенная схема использования двух источников питания для регулирования тока в обмотках шагового двигателя
Самый эффективный метод — чопперский. Он заключается в подаче на катушку двигателя не одиночных импульсов, а серии импульсов по форме напоминающих сигнал ШИМ. В первый момент импульса от генератора прикладывается более высокое напряжение, которое ускоряет нарастание тока, позже оно ограничивается циклической работой транзистора.
В первый момент импульса от генератора прикладывается более высокое напряжение, которое ускоряет нарастание тока, позже оно ограничивается циклической работой транзистора.
Фрагмент схемы биполярного контроллера с технологией чоппера
Форма сигнала прерывателя для управления транзистором
Напоминаем, что в первые моменты управляющего импульса продлеваем включение транзистора, что позволяет быстрее увеличить ток, благодаря гораздо более высокому напряжению VCC, чем номинальное напряжение мотора. В следующие моменты импульса значительно сокращаем время транзистора, он работает циклически и тем самым ограничивает напряжение до номинального рабочего напряжения шагового двигателя. Компаратор, который будет сравнивать напряжения решает, когда сигнал управления транзистора должен быть переключен с постоянного на прерывистый. Благодаря этому есть возможность регулировать ток, подаваемый на катушку шагового двигателя.
Схема использования компаратора в биполярном контроллере
Эта схема очень эффективна и позволяет регулировать ток катушки независимо от напряжения питания, изменяя напряжение Vs.
Напряжение питания катушки VCC намного выше, чем рабочее напряжение обмотки, а это означает что после включения транзистора ток достигает своего рабочего значения намного быстрее, за гораздо более короткое время чем постоянная времени L / R. После достижения порогового значения (установленного Vs) компаратор сравнивает падение напряжения на управляющем резисторе Rs с напряжением Vs. Если ток двигателя и, следовательно, падение напряжения на Rs увеличиваются выше напряжения Vs, компаратор запускает моностабильный триггер, который излучает один импульс и на короткое время отключает напряжение питания катушки, что снижает ток, а затем цикл повторяется с начала.
В результате компаратор и триггер циклически открывают и закрывают транзистор, что предотвращает повышение напряжения катушки до напряжения питания VCC. За счет циклической работы транзистора ограничивается напряжение питания катушки шагового двигателя. Тогда течение имеет пилообразную волну. Ниже представлена диаграмма тока в обмотке прерывателя.
График импульсов тока в обмотке
Этот управляющий сигнал с прерывистой катушкой позволяет увеличить крутящий момент шагового двигателя, особенно при более высоких скоростях вращения. Конечно потребуется еще более интеллектуальная система управления (эта проблема была решена с появлением встроенных драйверов шаговых двигателей и микроконтроллеров), но она позволяет ускорить процесс увеличения тока благодаря подаче гораздо более высокого напряжения на более высокие частоты от генератора, без значительных потерь энергии или использования двух разных источников питания. Тут понадобится только один блок питания с относительно высоким напряжением.
Очень хорошая альтернатива, особенно в тех случаях когда драйвер не нуждается в специальных функциях, — использовать готовые интегральные микросхемы драйверов шаговых двигателей. Многие производители предлагают широкий спектр специализированных чипов, разработанных специально для управления шаговыми двигателями.

Обмотки шаговых двигателей чаще всего управляются формой сигнала ШИМ через H-мосты, по одному на обмотку. Угол поворота пропорционален количеству импульсов, а скорость вращения — их частоте. При работе с полными ступенями довольно много шума и вибрации. К сожалению, также могут быть случаи пропуска ступеней («выход») и, как следствие, потеря контроля над положением ротора. Эта проблема решается за счет использования микрошагов, таким образом питая обмотки так, что ротор проходит через промежуточные положения за один полный шаг.
Если для быстрой остановки двигателя требуется еще несколько шагов, важно правильно определить состояние перехода и остановки. В этом случае желательно управление с обратной связью в отличие от абсолютного позиционирования с обратной связью, основанного на подсчете шагов. Существует адаптивное управление скоростью шагового двигателя, позволяющее остановить его как можно скорее, несмотря на возможное увеличение нагрузки на этом этапе.
Это возможно на основании наблюдения увеличения BENF и соответствующего увеличения частоты импульсов, питающих двигатель. Вышеописанный алгоритм реализован в интегрированном однокристальном контроллере AMIS-30624. Он настроен для работы с различными типами шаговых двигателей, диапазонами позиционирования и такими параметрами, как скорость, ускорение и замедление.
Схема контроллера AMIS-30624
Он имеет встроенный бессенсорный детектор потери шага, который предотвращает потерю шагов позиционером и быстро останавливает двигатель при его остановке. Это обеспечивает тихую, но точную калибровку во время эталонного прогона и позволяет работать с полузамкнутым контуром. AMIS-30624 включает в себя как аналоговые цепи высокого напряжения, так и цифровые блоки управления. Чип разработан для применений в автомобильной, промышленной и строительной отраслях.
Форум
Форум по обсуждению материала УПРАВЛЕНИЕ ШАГОВЫМИ ДВИГАТЕЛЯМИ
|
| ||||

Скупка переключателей СССР и тумблеров, цена
Во многих радио устройствах, электроприборах и устройствах электротехники есть такие компоненты как переключатели, тумблеры, кнопки. Часто такие детали могут находиться на различных складах предприятий или лежать дома.
Вряд ли они могут понадобиться в хозяйстве или где-либо еще. Поэтому зачастую эти переключатели попросту выкидывают на свалку. Но мы предлагаем более выгодное их использование.
Во многих таких устройствах есть контакты и электросхемы, содержащие различные драгоценные и дорогостоящие драгметаллы. Но определить их количество, местонахождение без специальных знаний невозможно. А тем более извлечь эти металлы. Вероятнее всего деталь просто-напросто будет испорчена.
А тем более извлечь эти металлы. Вероятнее всего деталь просто-напросто будет испорчена.
Поэтому если у вас есть такие устройства — обращайтесь к нам. Мы проведем экспертную оценку, определим модель, количество драгоценных металлов и рассчитаем цену. Скупка переключателей, тумблеров, кнопок — наш профиль. Мы купим у вас советские, импортные, совсем старые или совершенно новые модели.
Очень дорогими являются переключатели, сделанные в СССР. Тогда к производству радиодеталей подходили достаточно серьезно и делали их качественно и из дорогих компонентов. В контактах таких переключателей содержится золото, палладий и другие драгоценные сплавы.
При скупке переключателей цена зависит от модели, общего веса, содержащихся в ней металлов и тарифов на эти металлы в настоящий момент. Мы определяем эти показатели и выводим общую стоимость вашего прибора. При оценке веса мы используем современные откалиброванные весы высокой точности.
Продать переключатели СССР и других стран можно достаточно выгодно. Производим скупку таких моделей как: ПГ2, 5,7, ПР2-10, ПР2-2, ПР2-5, П1Т3-1В, П1Т4-1В до 82 года, П1Т3-1В, П1Т4-1В после 82 года, П1Т3-1В, П1Т4-1В после 89 года, П1М9-1В, ПКн2, ПКн4, ПТ8 после 82г, ПКн2, ПКн4, ПТ8 до 82 г, ВДМ, ПКн-125, ПКн-150, П2Кн после 82 года, П2Кн до 82 года,ПГ43 желтые, ШИВ, ШИ, ТВ1-1 со схемой и стрелкой, П2Г, ПКн8, КН-П.
Производим скупку таких моделей как: ПГ2, 5,7, ПР2-10, ПР2-2, ПР2-5, П1Т3-1В, П1Т4-1В до 82 года, П1Т3-1В, П1Т4-1В после 82 года, П1Т3-1В, П1Т4-1В после 89 года, П1М9-1В, ПКн2, ПКн4, ПТ8 после 82г, ПКн2, ПКн4, ПТ8 до 82 г, ВДМ, ПКн-125, ПКн-150, П2Кн после 82 года, П2Кн до 82 года,ПГ43 желтые, ШИВ, ШИ, ТВ1-1 со схемой и стрелкой, П2Г, ПКн8, КН-П.
Приобретаем как новые, так и бывшие в употреблении детали, в целом состоянии или разобранные.
Цены на них могут варьироваться и зависеть, в том числе от состояния детали, ее целостности. Некоторые модели могут достигать стоимости 2400 гривен и выше.
Если вы не уверены в том какая у вас модель, или в том сколько она может стоить — свяжитесь с нами. Мы проконсультируем вас по любым возникшим вопросам. Телефоны и контакты указаны на нашем сайте. Вы можете сделать фотографию вашей модели, описать ее и отправить нам. В течении короткого времени мы ответим вам, ведь мы онлайн всегда.
Схема работы очень проста — вы приносите свой прибор, мы при вас оцениваем его и тут же на месте выплачиваем деньги. Возможен вариант отправки почтой по договоренности. Тогда деньги выплачиваем на карту.
Возможен вариант отправки почтой по договоренности. Тогда деньги выплачиваем на карту.
Моторизованные переключатели
(КО) 910100-5
Электронный измельчитель Litton Systems / Rawco . 6,3 переменного тока, 400 Гц. Делает до перерывов. Центральная монтажная шпилька 0,7″ x 0,53″ x 0,35″. NSN: 5945-00-782-7635.
125 долларов за штуку
(КО) PW30107-1
Автоматический электрический Поворотный шаговый переключатель типа 45. 26 позиция. 8 полюсов, но только 4 включаются одновременно. 15 — 30 В постоянного тока.(номинальное напряжение 24 В). Максимальные размеры 5-1/2″ x 6-1/4″ x 2-1/2″W.
*** ПРОДАНО ***
(КСВ) 653219
Поворотное шаговое реле OAK дополнено пластиной 1P10T
закорачивающей пластиной, которая закорачивает все, кроме выбранного положения. Золотые контакты. 115
Ом, катушка 36 — 48 В постоянного тока. Квадрат 2-1/8 дюйма, длина 2-3/4 дюйма.
Золотые контакты. 115
Ом, катушка 36 — 48 В постоянного тока. Квадрат 2-1/8 дюйма, длина 2-3/4 дюйма.
49 долларов США за штуку — 39 долларов США (3+)
(КО) PW-151111-JADA
Поворотный шаговый переключатель GTE Automatic Electric .1П11Т. В конце каждого полного оборота кулачок выполняет вспомогательный листовой переключатель DPDT. А второй листовой переключатель (SPDT) перемещается при каждой активации катушки. Катушка 1400 Ом. НСН: 5930-00-902-7082.
*** ПРОДАНО ***
(КО) AP11A
Моторизованный переключатель DPDT с фиксацией. 120 В переменного тока, 50/60 катушка Гц. 5 ампер. Поддерживает контактное положение без питания. 2-1/8″ х 3-3/4″ x 1-3/4″ в высоту.Харрис P/N: 574-0301-000.
*** ПРОДАНО ***
(КСВ) A48336-001
Моторизованный переключатель марки Ledex . 28 В постоянного тока, катушка 12,2 Ом. DP3T плюс положения «OFF» и «Isolated». 2-я пластина выполняет управление положением. Контакт на 1 ампер, пластиковая пластина. индекс 30º. Квадратный монтажный фланец 1,5 дюйма. Общая длина 2,5 дюйма. Угловые отверстия 1,25 дюйма c-c. Доступно 60+!!
28 В постоянного тока, катушка 12,2 Ом. DP3T плюс положения «OFF» и «Isolated». 2-я пластина выполняет управление положением. Контакт на 1 ампер, пластиковая пластина. индекс 30º. Квадратный монтажный фланец 1,5 дюйма. Общая длина 2,5 дюйма. Угловые отверстия 1,25 дюйма c-c. Доступно 60+!!
$35 за штуку — $32 (3+)
(КО) А-25432
Поворотный шаговый переключатель CP Clare .2П10Т + выкл. 2 катушки управления. Катушка 1 : 3,3 Ом. Продвижение переключается на одну позицию за импульс. Катушка 2 : 8,2 Ом переводит ротор в исходное положение «Выкл.». 3-3/8″ x 4-1/2″ x 1-1/4″ W. Harris P/N: 586-0006-000.
*** ПРОДАНО ***
(КО) B295874
Поворотный шаговый переключатель CP Clare . 3П11Т. Непрерывное вращение. катушка 28 В постоянного тока. Вспомогательный переключатель SPDT смыкается после завершения полного оборота. Второй контакт SPDT открывается и закрывается при каждом движении вперед.Габаритные размеры 2-3/8″ x 4-3/8″ x 1-1/4″.
Второй контакт SPDT открывается и закрывается при каждом движении вперед.Габаритные размеры 2-3/8″ x 4-3/8″ x 1-1/4″.
$119 за штуку
(КО) МДР-6008
Поворотное реле Potter & Brumfield . 4PST, нормально закрытый. 115 В переменного тока, номинал 59 мА. Максимальное напряжение 440 В переменного тока, сопротивление постоянному току 8,4 Ом. 16 контактных клемм. Включает монтажное оборудование. Втягивающий ток, номинал 3 ампера. 2 обмотки катушки, вращение вала 40º. 4,25″Д x 5,5″В x 4,25″Ш. NOS. Спецификация Mil. NSN: 5945-00-678-6229.
$395 за штуку
(КО) 110636
AB Industries Двойные реле DPDT с управлением
с общей арматурой, которая механически переключается в каждое положение покоя.Можно использовать
либо обе катушки, либо одна катушка с обратной полярностью. контакты на 10 ампер. катушка 12в постоянного тока. Используйте везде, где важно поддерживать целостность цепи при отключении питания. Максимальный размер 3,25″ x 1,75″ x 1,375″ В.
Используйте везде, где важно поддерживать целостность цепи при отключении питания. Максимальный размер 3,25″ x 1,75″ x 1,375″ В.
21 долл. США за штуку — 19 долл. США (6+) — 17,60 долл. США (24+)
(КО) A224331
Поворотный шаговый переключатель CP Clare тип 20. 8 полюсов, 20 позиций. Катушка: 3 Ом. 4-1/2″ x 5-1/4″, толщина 1-3/4″.
*** ПРОДАНО ***
(КО) PW131105GHAB
Автоматическое электрическое шаговое реле типа 45. 10 полюсов, 26 позиций. Управляющее напряжение 24 В постоянного тока, 1 А, контакты 115 В переменного тока. Непрерывное вращение. Когда ротор подходит к последнему контакту, другой ротор, расположенный напротив @ 180º, начинает работу в положении 1. Контрольный контакт также отмечает конец/начало. Два дополнительных контрольных контакта, 5 ампер, один нормально разомкнутый, один нормально замкнутый. 5″ x 7″ x 2-3/4″W максимальные размеры.
5″ x 7″ x 2-3/4″W максимальные размеры.
$399 за штуку
(КСВ) 26-2425
Поворотный шаговый переключатель CP Clare тип 26. 10 полюсов, 26 позиций. Управляющее напряжение 24 В постоянного тока. 1 ампер, 115 В переменного тока контакты. НСН: 5945-01-050-0957.
$375 за штуку
(ТО) А-48071-001
Поворотный соленоид. Контактный режим 24 В постоянного тока. поворот на 90º, 2 провода провод. Высокий крутящий момент. 3-3/8″Д x 2-5/8″В.2 шпильки mtg перед. Диаметр 0,430 дюйма. Вал выходит за пределы на 2-5/8 дюйма.
$95 за штуку
(СВР) 5-53523-109
12-ступенчатый поворотный двигатель с 16 зубьями и шестерней 5/16″.
Только контрольная пластина. 12–24 В постоянного тока, катушка 8 Ом, непрерывное вращение. Импульсный или постоянный
повышение напряжения
переключаться по одному. Удалите и повторно подайте заявку, чтобы снова продвинуться. Квадрат 1-1/2 дюйма, всего 2-5/8 дюйма
длина.
Удалите и повторно подайте заявку, чтобы снова продвинуться. Квадрат 1-1/2 дюйма, всего 2-5/8 дюйма
длина.
$25 за штуку
(КСВ) IR-805-S
Реле короткого замыкания Guardian . 32 полюса, катушка 24 В постоянного тока, Контакты на 3 ампера, нормально разомкнутые.
125 долларов за штуку
(ТО) ИР-705-12П-24Д
Шаговое реле Guardian Rotomite . Непрерывная обязанность. 12 контактов, 24 В пост. тока, резистивный контакт 3 А. 1-1/8″D x 3″L с кронштейном. 1/4-дюймовые лепестковые клеммы.НСН: 5930-00-222-8146.
75 долларов за штуку — 69 долларов (3+), 65 долларов (12+)
(КО) БА-11-11
Stevens-Arnold Inc Прерыватель постоянного и переменного тока. ДДДТ. 9-контактная база. 6,3 В переменного тока при частоте 60 Гц. Делает до перерывов. Контакты 10 В постоянного тока 1 мА. Фазовый угол 22°, время задержки 55°. НСН: 5945-00-968-4997.
Делает до перерывов. Контакты 10 В постоянного тока 1 мА. Фазовый угол 22°, время задержки 55°. НСН: 5945-00-968-4997.
125 долларов за штуку
» Телефонные коммутаторы | Профессор Марк Целе
Механизм переключения (магистральный)
Один двухосевой переключатель Строугера можно использовать для замены одиннадцати переключателей из предыдущего примера, просто используя первый набор импульсов набора для перемещения переключателя вверх к блоку контактов, а затем используя второй набор импульсов для поворота контактов. до линии назначения.В этом отношении коммутатор напоминает стопку из десяти односелекторных коммутаторов.
Более эффективное использование этих переключателей предполагает использование транкинга, в котором импульсы набора номера перемещают дворники вверх, после чего схема, подключенная к переключателю, автоматически переключает контакты до тех пор, пока не будет найдена свободная магистральная линия, соединяющая этот переключатель со следующим. В приведенном выше примере набирается цифра «6», что заставляет контакты повышать шесть уровней, после чего дворники многократно вращаются, пока не будет найдена свободная магистральная линия, соединяющая ее со следующим переключателем (который, в свою очередь, обрабатывает следующую набранную цифру) .В приведенном выше примере первые три магистральные линии (зеленые контакты) уже используются и поэтому недоступны до тех пор, пока не будет обнаружена четвертая магистральная линия (свободная, красная), в которой входящая линия подключается к этому выходу.
В приведенном выше примере набирается цифра «6», что заставляет контакты повышать шесть уровней, после чего дворники многократно вращаются, пока не будет найдена свободная магистральная линия, соединяющая ее со следующим переключателем (который, в свою очередь, обрабатывает следующую набранную цифру) .В приведенном выше примере первые три магистральные линии (зеленые контакты) уже используются и поэтому недоступны до тех пор, пока не будет обнаружена четвертая магистральная линия (свободная, красная), в которой входящая линия подключается к этому выходу.
Продолжая анализ транкинга, в приведенном выше примере показана АТС с тремя номерами (это именно то, что было в городе, в котором я живу, в начале прошлого века, поскольку я видел ранние рекламные объявления с трехзначными телефонными номерами) . Первый переключатель Строуджера слева — это поворотный «охотничий» переключатель, который ищет снятую трубку телефона, выполняющего вызов.Когда телефон снимается с трубки, напряжение в сети (обычно 48 вольт) падает примерно до 12 вольт. Поворотный переключатель охотника-селектора просматривает все входящие линии до тех пор, пока не будет найдена земля, указывающая на то, что линия снята. Он устанавливает соединение со следующим переключателем, селектором, который обеспечивает тон набора и фактически обрабатывает первую цифру. В этом примере оба селектора свободны, поэтому выбирается первый (верхний). Затем абонент набирает первую цифру «5», после чего селектор переходит на пять уровней вверх.Теперь между набранными цифрами есть пауза, в течение которой переключатель вращается, чтобы найти следующий свободный селектор в цепочке… в этом примере второй селектор (называемый разъемом , как мы увидим) занят, поэтому следующий в цепочке ( внизу справа) выбран. В цепочке может быть любое количество селекторов — для пятизначной схемы набора будет три набора селекторов. Однако, если все цифры не требуются, в некоторых офисах селекторы могут быть настроены на поглощение цифр. Полную цепочку переключателей для семизначной системы можно увидеть – это поможет прояснить расположение переключателей в системе.
Поворотный переключатель охотника-селектора просматривает все входящие линии до тех пор, пока не будет найдена земля, указывающая на то, что линия снята. Он устанавливает соединение со следующим переключателем, селектором, который обеспечивает тон набора и фактически обрабатывает первую цифру. В этом примере оба селектора свободны, поэтому выбирается первый (верхний). Затем абонент набирает первую цифру «5», после чего селектор переходит на пять уровней вверх.Теперь между набранными цифрами есть пауза, в течение которой переключатель вращается, чтобы найти следующий свободный селектор в цепочке… в этом примере второй селектор (называемый разъемом , как мы увидим) занят, поэтому следующий в цепочке ( внизу справа) выбран. В цепочке может быть любое количество селекторов — для пятизначной схемы набора будет три набора селекторов. Однако, если все цифры не требуются, в некоторых офисах селекторы могут быть настроены на поглощение цифр. Полную цепочку переключателей для семизначной системы можно увидеть – это поможет прояснить расположение переключателей в системе.
Последний селектор называется коннектором и обрабатывает две последние набранные цифры. В приведенном выше примере второй набранной цифрой была тройка, поэтому выбран третий уровень контакта. Наконец, последняя цифра заставляет переключатель вращаться на это количество шагов, чтобы найти конечный пункт назначения. Только коннекторы обрабатывают две цифры.
Как видите, в системе есть три конфигурации переключателей: селекторы-охотники («передовые» переключатели), селекторы (которых будет больше, чем любых других переключателей в системе) и коннекторы (которые обрабатывают конечное соединение, а также обрабатывать две цифры номера).
Теперь, как заметил один читатель, конфигурация Hunter такова, что для каждой абонентской линии требуется один селекторный переключатель Hunter — входящая линия затем направляется на один из десяти транков к первому селектору. Это нормально для небольшого количества линий и действительно использовалось в некоторых системах в начале 1900-х годов, однако, когда используется несколько тысяч линий, сложность обеспечения каждой линии коммутатором становится непомерно высокой. Разработана усовершенствованная система, при которой первыми переключателями являются «линейные искатели»: сначала плунжерные, затем поворотные.Эти переключатели постоянно ищут вызывающие каналы, подключая такие каналы к незанятым селекторам, чтобы процесс выбора мог продолжаться, как описано выше.
Разработана усовершенствованная система, при которой первыми переключателями являются «линейные искатели»: сначала плунжерные, затем поворотные.Эти переключатели постоянно ищут вызывающие каналы, подключая такие каналы к незанятым селекторам, чтобы процесс выбора мог продолжаться, как описано выше.
Итак, переключатели Strowger бывают трех вариаций: линейные, селекторные (самые многочисленные в системе) и коннекторы. В типичной системе на каждые 200 входящих линий приходится около 20 линейных искателей. Linefinders идентифицируются тремя банками по 100 терминалов в каждом внизу. Стартовая схема используется для повышения и вращения, чтобы найти клемму под напряжением.Затем селекторы используются для выбора каждой цифры, кроме двух последних цифр, которые маршрутизируются соединителем. Селекторы имеют два блока клемм внизу, верхний блок на 100 входящих двухпроводных соединительных линий и нижний блок контактов управления. Первые селекторы уникальны тем, что они обеспечивают гудок. Верхний банк контактов (доступен при подсчете десяти импульсов, то есть при наборе нуля в качестве первой цифры) направляет входящий вызов оператору, а нижний банк (доступ при наборе единицы и подсчете одного импульса) ) маршрутизирует вызовы на специальные службы, например междугородные.Вращение переключателя затем направляет вызов на соединительную линию к следующему (второму) селектору. В случае, если какой-либо селекторный переключатель поворачивается слишком далеко, не находя свободной магистрали к следующему селектору, переключатель на поворотном валу замыкается, сигнализируя о том, что «магистраль занята» — эти контакты есть только у селекторов. Наконец, коннектор обрабатывает две последние цифры: вертикальное (вверх/вниз) движение предпоследней цифры и горизонтальное (вращательное) движение последней цифры. Коннекторы имеют те же группы контактов, что и селекторы, за исключением того, что каждый терминал теперь подключается непосредственно к абонентской линии.Соединители также выполняют специальные функции, такие как проверка занятости линии и, если линия свободна, подача сигнала вызова.
Верхний банк контактов (доступен при подсчете десяти импульсов, то есть при наборе нуля в качестве первой цифры) направляет входящий вызов оператору, а нижний банк (доступ при наборе единицы и подсчете одного импульса) ) маршрутизирует вызовы на специальные службы, например междугородные.Вращение переключателя затем направляет вызов на соединительную линию к следующему (второму) селектору. В случае, если какой-либо селекторный переключатель поворачивается слишком далеко, не находя свободной магистрали к следующему селектору, переключатель на поворотном валу замыкается, сигнализируя о том, что «магистраль занята» — эти контакты есть только у селекторов. Наконец, коннектор обрабатывает две последние цифры: вертикальное (вверх/вниз) движение предпоследней цифры и горизонтальное (вращательное) движение последней цифры. Коннекторы имеют те же группы контактов, что и селекторы, за исключением того, что каждый терминал теперь подключается непосредственно к абонентской линии.Соединители также выполняют специальные функции, такие как проверка занятости линии и, если линия свободна, подача сигнала вызова. Таким образом, вызов в обычной семизначной системе будет маршрутизироваться с абонентской (вызывающей) линии с помощью линейного поиска, через пять селекторов (по одному на каждую из первых пяти набранных цифр) и, наконец, через один соединитель, который обрабатывает последние две цифры набраны, подключение к вызываемой линии.
Таким образом, вызов в обычной семизначной системе будет маршрутизироваться с абонентской (вызывающей) линии с помощью линейного поиска, через пять селекторов (по одному на каждую из первых пяти набранных цифр) и, наконец, через один соединитель, который обрабатывает последние две цифры набраны, подключение к вызываемой линии.
Мой конкретный переключатель строуджера представляет собой селектор: два набора контактов прикреплены к вращающемуся валу, а вал имеет набор контактов «магистраль занят».Пять горизонтальных реле находятся в верхней части устройства в позициях A, B, C, E и F. Одно реле (A) имеет две обмотки катушки, а реле в позиции C имеет медное кольцо на пятке для задержки (см. осталось для использования этих реле или ).
Хотя никто никогда не подключал бы наборный номер напрямую к разъему, приведенная выше диаграмма (из руководства 1950-х годов «Электрические принципы телефонии», бюллетень 800, выпущенного Automatic Electric, дочерней компанией General Telephone and Electronics) довольно хорошо описывает, как Strowger переключатель работает. При поднятии трубки телефон абонента замыкает линейную цепь и втягивает импульсное реле. В свою очередь также срабатывают удерживающее реле и реле последовательности. Предположим теперь, что звонящий набирает «3-4». Первое число, 3, генерирует три быстрых импульса на импульсном реле (быстродействующее реле). Хотя это размыкает цепь удерживающего реле, это реле имеет медную втулку на пятке, которая заставляет его удерживать примерно одну треть секунды, поэтому во время последовательности импульсов оно остается втянутым.Каждый раз, когда срабатывает импульсное реле, импульсы посылаются через контакты удерживающего реле и реле последовательности на вертикальные магниты, заставляя переключатель Строугера повышать три импульса вверх до третьего уровня контакта банка. Реле последовательности также оснащено медным кольцом и поэтому остается втянутым во время потока импульсов.
При поднятии трубки телефон абонента замыкает линейную цепь и втягивает импульсное реле. В свою очередь также срабатывают удерживающее реле и реле последовательности. Предположим теперь, что звонящий набирает «3-4». Первое число, 3, генерирует три быстрых импульса на импульсном реле (быстродействующее реле). Хотя это размыкает цепь удерживающего реле, это реле имеет медную втулку на пятке, которая заставляет его удерживать примерно одну треть секунды, поэтому во время последовательности импульсов оно остается втянутым.Каждый раз, когда срабатывает импульсное реле, импульсы посылаются через контакты удерживающего реле и реле последовательности на вертикальные магниты, заставляя переключатель Строугера повышать три импульса вверх до третьего уровня контакта банка. Реле последовательности также оснащено медным кольцом и поэтому остается втянутым во время потока импульсов.
После завершения потока из трех импульсов удерживающее реле остается втянутым, однако ток больше не подается на реле последовательности, поэтому через короткий промежуток времени реле последовательности отключается. Теперь пользователь набирает «4». Импульсы теперь направляются от импульсного реле через удерживающее реле, но на этот раз реле последовательности размыкается, и поэтому импульсы подаются на вращающийся магнит, заставляя грязесъемник вращаться вокруг контактов на четыре шага. Строка 34 теперь выбирается переключателем Strowger. Когда вызывающий абонент освобождает линию, цепь линии размыкается и удерживающее реле размыкается. Теперь, когда расцепляющий магнит работает, вал поворачивается (под действием пружины в верхней части вала) в исходное положение, а грязесъемник опускается под действием силы тяжести в самое нижнее положение.
Теперь пользователь набирает «4». Импульсы теперь направляются от импульсного реле через удерживающее реле, но на этот раз реле последовательности размыкается, и поэтому импульсы подаются на вращающийся магнит, заставляя грязесъемник вращаться вокруг контактов на четыре шага. Строка 34 теперь выбирается переключателем Strowger. Когда вызывающий абонент освобождает линию, цепь линии размыкается и удерживающее реле размыкается. Теперь, когда расцепляющий магнит работает, вал поворачивается (под действием пружины в верхней части вала) в исходное положение, а грязесъемник опускается под действием силы тяжести в самое нижнее положение.
будут иметь еще одно реле последовательности с медленным срабатыванием, чтобы обнаруживать конец набранной цифры и направлять поток импульсов к следующему селектору в цепочке. Затем для маршрутизации цифр между двумя осями, а в системе между двумя последовательными реле требуются реле с задержкой времени (как показано выше). Для использования в телефонной системе, разработанной задолго до появления полупроводников, были разработаны гениально-простые реле с медными обоймами, накапливающими токи (действующими как вторичная обмотка трансформатора с низким импедансом) и замедленным действием реле, либо с медленным высвобождением или с медленным действием. Такое реле показано справа.
Такое реле показано справа.
Реле могут действовать как медленно работающие или медленно отпускающие. Если медный хомут установлен на конце якоря реле, подача тока на катушку реле заставляет медный хомут создавать поле, противоположное полю катушки. Это поле постепенно угасает, и в конце концов реле срабатывает (после задержки). Там, где на пятке реле установлен медный воротник, при отключении тока он создает поле в том же направлении, что и исходная катушка — в конечном итоге оно гаснет, но при этом удерживает реле замкнутым дольше, чем обычно.Реле медленного отпускания расположено в верхней части моего переключателя.
Телефонный мир — Пошаговые системы телефонной коммутации
Информация о первой автоматизированной системе коммутации – телефонной коммутации Step-by-Step (Strowger) и ее вариантах.
Обзор и история систем пошагового переключения
Система переключения Step by Step была изобретена в 1888 году и запатентована в 1891 году Алмоном Строугером, гробовщиком из Канзас-Сити, штат Миссури, США. Ходят слухи, что местный оператор коммутатора перенаправлял звонки со своего бизнеса на других. Он хотел, чтобы звонки автоматически направлялись в пункт назначения без вмешательства оператора.
Ходят слухи, что местный оператор коммутатора перенаправлял звонки со своего бизнеса на других. Он хотел, чтобы звонки автоматически направлялись в пункт назначения без вмешательства оператора.
Его изобретение менялось на протяжении многих лет, но основная концепция осталась прежней. Система работает с использованием вращающихся «селекторов», которые могут выбирать «уровень» (или шаг) по количеству импульсов, прерываемых на линии (используя «вращающийся» телефон). Это дало указание соленоиду переместить этот стеклоочиститель (или селектор) в определенное положение в зависимости от количества полученных им импульсов.Затем вызывающий абонент переводится на другой уровень, и снова выполняется импульсный набор для перехода на другой уровень, и так далее, пока вызывающий абонент не достигнет абонента, которому он звонил на последнем уровне (или набранной им цифры).
Добавление селектора поиска линии для уменьшения количества необходимых селекторов переключения (один на каждые 10 или более абонентов вместо одного на каждого абонента). Позже была добавлена дополнительная схема, чтобы добавить «установку тонов» для обеспечения прогресса и информационных тонов, таких как сигналы набора номера, сигналы контроля посылки вызова и т.п.
Позже была добавлена дополнительная схема, чтобы добавить «установку тонов» для обеспечения прогресса и информационных тонов, таких как сигналы набора номера, сигналы контроля посылки вызова и т.п.
Строугер основал Strowger Automatic Telephone Exchange Company в 1892 году. Строугер продал свои патенты в 1896 году и продал Strowger Automatic Electric в 1898 году. Строугер умер в 1902 году от аневризмы головного мозга.
В 1901 году Strowger Company передала лицензию на технологию Automatic Electric Company. В 1908 году две компании объединились и получили последнее название. В 1957 году General Telephone (позже GTE) приобрела Automatic Electric, чтобы стать их производственным подразделением. В 1989 году Automatic Electric объединилась с производственным подразделением AT&T и образовала компанию AGCS (AT&T-GTE Communications).К 1996 году AT&T передала свое производственное подразделение Lucent Technologies вместе с AGCS. То, что было AGCS, теперь Lucent.
В конце концов компания Bell System начала производить переключатели Step-by-Step. Однако их первая установка переключателя Step-by-Step была произведена НЕ Western Electric, а Automatic Electric! Этот первый переключатель Step-by-Step, принадлежащий Bell System, был установлен в 1919 году в Норфолке, штат Вирджиния. Это соглашение Automatic Electric-Western Electric просуществовало пять лет, пока Western Electric не смогла начать производство собственных выключателей.
Однако их первая установка переключателя Step-by-Step была произведена НЕ Western Electric, а Automatic Electric! Этот первый переключатель Step-by-Step, принадлежащий Bell System, был установлен в 1919 году в Норфолке, штат Вирджиния. Это соглашение Automatic Electric-Western Electric просуществовало пять лет, пока Western Electric не смогла начать производство собственных выключателей.
Пошаговых вариантов было много. Один из них назывался переключателем «XY», сделанным Stromberg-Carlson. Это была двухосная (горизонтальная и вертикальная). Это был плоский механизм, и подвижные контакты двигались как вперед-назад, так и из стороны в сторону. Это считалось более простой и дешевой версией Strowger Step by Step и обычно использовалось в сельских районах Среднего Запада США.
Системы Step-by-Step различных стилей и производителей получили широкое распространение во всем мире.В США последний коммутатор Step-by-Step был выведен из эксплуатации и заменен цифровой системой коммутации в 1999 г. Последний коммутатор Step-by-Step в Соединенном Королевстве был заменен в 1995 г. В Канаде последний коммутатор Step Пошаговый коммутатор в телефонной сети общего пользования в Северной Америке был заменен в 2002 году. За пределами Северной Америки и Западной Европы в некоторых небольших странах третьего мира и бывших советских странах в Европе, с помощью этих систем.
Последний коммутатор Step-by-Step в Соединенном Королевстве был заменен в 1995 г. В Канаде последний коммутатор Step Пошаговый коммутатор в телефонной сети общего пользования в Северной Америке был заменен в 2002 году. За пределами Северной Америки и Западной Европы в некоторых небольших странах третьего мира и бывших советских странах в Европе, с помощью этих систем.
Обычные производители переключателей Step-by-Step и их вариантов, которые использовались в Северной Америке:
Автоматический электрический
ITT (включая FTR, Kellogg и FTR-Kellogg)
Стромберг-Карлсон (XY)
Вестерн Электрик
- № 1
- № 350А
- № 355A CDO (общий телефонный номер)
- № 356А
- № 360А
Примечание. Некоторые из этих компаний производили переключатели Step-by-Step по лицензиям Western Electric или Automatic Electric.
Изображение коммутатора Western Electric Step-by-Step Community Dial Office в Музее связи (Сиэтл, Вашингтон)
Подробнее
Статья в Википедии об Алмоне Строуджере
Статья в Википедии о шаговом коммутаторе
E объяснение того, как работает шаговый коммутатор
Список телефонных коммутаторов в Википедии
Указатель систем коммутации винтажных телефонов
Step by Step (Strowger) Switching Systems Главная страница Бытовые выключатели Бытовые выключатели довольно просты. Рубильник Два двухполюсных, на два направления (DPDT или 2П2Т) рубильники.«Нож» вступает в контакт, «режя» между двумя пружинными вкладками. Эти простые переключатели более сложны чем бытовые выключатели. Одним из преимуществ является то, что вы можете видеть, в каком состоянии они находятся в. Поворотный переключатель Хотя поворотные переключатели могут быть как простой, как переключатель SPST, этот сложный переключатель имеет 24 полюса и 8 направлений (24П8Т). Моторизованный кулачковый переключатель Опять же, моторизованный кулачок мог управлять один переключатель SPST, но этот блок управляет 10 микропереключателями SPDT. То кулачки могут быть запрограммированы вручную для управления любой последовательностью операций, которые будет постоянно циклироваться. Это 10-клавишный кулачковый таймер. Моторизованный кулачковый переключатель Опять же, моторизованный кулачок мог управлять один переключатель SPST, но этот блок управляет 5 микропереключателями SPDT. Крупный план кулачка/микропереключателя интерфейс выше. Электромагнитный шаговый переключатель — 1P24T Однополюсный 24-позиционный (1P24T) поворотный переключатель, который можно увеличивать на один шаг, управляя соленоидом.Второй соленоид вернет переключатель в исходное положение. Еще один вид выше. Электромагнитный шаговый переключатель — 10P27T A 10-полюсный 27-позиционный (10P27T) поворотный переключатель, который можно увеличивать на один шаг, управляя соленоидом. Еще один вид выше. Колеса шифрования — Swiss NEMA Модификация немецкой ЭНИГМЫ машина, используемая для шифрования сообщений во время Второй мировой войны.Каждое колесо направляет 26 контактов случайным образом к другим 26 контактам на другой стороне. Поскольку каждое колесо установлено сообщение проходит через сложный лабиринт. Режимы сканирования определяют, сколько переключателей вы используете и как вы перемещаетесь между ними и выбираете элементы. Чтобы перейти к настройкам режима или шаблона: Proloquo2Go включает режимы сканирования как с одним, так и с двумя переключателями. Для двух режимов, обратного сканирования и автоматического пошагового сканирования, вы должны использовать экран в качестве переключателя.Все остальные режимы работают либо с экраном, либо с интерфейсом внешнего переключателя. Сканирование одного переключателя — хороший вариант для пользователей, у которых есть только один надежный способ нажать на переключатель или экран. Тем не менее, это требует значительного времени и внимания. Пользователь должен дождаться кнопки или действия, которое он хочет выбрать. Затем они должны нажать на переключатель, прежде чем сканирование продолжится до следующего элемента. Сканирование с помощью двух переключателей часто намного эффективнее для пользователей с двумя или более надежными способами нажатия на переключатель или на экран. Proloquo2Go включает три режима сканирования с одним переключателем: Для пользователей с двумя или более надежными способами нажатия на переключатель или экран сканирование двух переключателей часто выполняется быстрее. Сканирование с двумя переключателями включает в себя шаговый переключатель и переключатель выбора. Используйте шаговый переключатель, чтобы перейти к следующему элементу. Используйте переключатель выбора, как только вы достигнете нужного элемента. Каждый шаблон сканирования обеспечивает доступ к одним и тем же частям приложения. Разница заключается в том, группируются ли элементы при сканировании и каким образом. Шаговые двигатели используются для относительно низкоскоростных приводов с промежуточным крутящим моментом и приложений позиционирования, особенно там, где необходимо точное управление положением ротора с точностью до оборота. Двигатели этого типа обычно используются для привода барабанов электромеханических игровых автоматов (одноруких бандитов), для позиционирования головок дисковода для гибких дисков, для управления обучаемыми камерами и для привода ведущих колес небольших мобильных роботов.В былые времена они также использовались для позиционирования головок жестких дисков, хотя такие приложения давно были заменены механизмами типа звуковой катушки. Шаговые двигатели просты и дешевы в использовании, и вам не нужно иметь полностью замкнутый контроллер, чтобы использовать их точно. Существует несколько типов шаговых двигателей с различными требованиями к электроприводу. Однако на сегодняшний день наиболее распространенным типом двигателя, который можно найти на избыточном рынке (или удалить из ненужного компьютерного оборудования), является четырехполюсный униполярный тип 14 , поэтому именно для этого типа разработана наша схема. Без лишних слов, вот схема 15 : Рисунок 3-5. Схема управления шаговым двигателем В этом проекте используется восьмеричная высоковольтная сильноточная матрица Дарлингтона ULN2803 для переключения катушек шагового двигателя. В нашем примере модуль контроллера шагового двигателя также имеет два входа концевого выключателя с активным нижним значением.Опционально они используются для сигнализации окончания перемещения в направлениях шага увеличения и уменьшения. Обратите внимание, что JP4, который выбирает между 5 В или 12 В возбуждением для катушек шагового двигателя, предназначен для проводной связи для заводской конфигурации, а не для перемычки, которую может изменить пользователь. Если вы используете устройство в режиме привода 5 В, вам следует изменить или удалить ZD1; вы также можете опустить C2, поскольку он не выполняет никакой функции, если вы управляете двигателем от шины +5 В. Контроллер работает в одном из двух режимов: «драйв» или «поезд».«В режиме привода вы просто указываете скорость и направление, и двигатель вращается в этом направлении до тех пор, пока не будет дана команда остановиться. При желании вы можете запросить, чтобы он двигался до тех пор, пока не сработает любой из концевых выключателей. Обратите внимание, что концевые выключатели постоянно связаны с определенными направлениями поиска. «Нижний» концевой выключатель применяется только для поиска «назад», а «высокий» концевой выключатель применяется только для поиска «вперед». Этому есть две причины: во-первых, внешняя сила — скажем, вода, протекающая мимо руля подводной лодки, — может повернуть шаговый двигатель за точку замыкания концевого выключателя, прежде чем он достигнет механического упора. Во-вторых, переключатели практически никогда не бывают идеальными — другими словами, смещение, необходимое для замыкания контакта, не обязательно совпадает с смещением, необходимым для его разрыва. Контроллер шагового двигателя принимает 8-битные байты команд, за которыми могут следовать дополнительные данные.По сути, один и тот же код последовательного приема используется во всех проектах этой книги, поэтому здесь он заслуживает небольшого дополнительного изучения. Прежде всего, обратите внимание, что мой выбор назначения контактов ввода-вывода ни в коем случае не был произвольным. Прерывания AVR по изменению состояния выводов полезны, но не очень умны. К счастью, когда для вывода включена альтернативная функция, этот вывод больше не будет генерировать прерывания по изменению состояния (обратите внимание, что из этого правила есть несколько исключений). К счастью, три сигнала USI, используемые для связи в стиле SPI, отображаются на контакты PB0-PB2. Таким образом, при настройке USI в трехпроводном режиме PCINT0 сработает только в том случае, если PB3 изменит состояние. Поскольку USI в tiny26L не реализует логику выбора ведомого устройства аппаратно, нам нужно сделать это программно, и в результате всего обсуждения в предыдущем абзаце имеет смысл использовать PB3 в качестве линии выбора SPI. Весь код шагового двигателя содержится в трех обработчиках прерываний: переполнение USI, переполнение таймера 0 и PCINT0. PCINT0, пожалуй, самая важная функция в прошивке — она отвечает за проверку состояния PB3 и отключение выходного драйвера на MISO (PB1) при отключении контроллера шагового двигателя (чтобы мы не боролись ни с чем другим на шине). ) или включить его, если установлен _SSEL. Когда устройство не выбрано, этот ISR также отключает прерывания USI, потому что нас не волнуют другие транзакции, которые могут происходить на шине, а необходимость обслуживания прерываний USI вызывает дрожание синхронизации в любой операции шага, которую мы выполняем. на заднем фоне.Вот код этого обработчика: Фактические пошаговые операции выполняются в прерывании переполнения таймера 0. Таймер 0, который имеет 8-битный регистр счетчика, тактируется через предварительный делитель на частоте CK/256, что составляет примерно 14,053 кГц. Наиболее сложным сегментом кода, по крайней мере с точки зрения объема кода, является обработчик USI. Этот обработчик реализует простой конечный автомат. Первый байт, полученный после того, как строка выбора станет активной, является командным байтом. Этот байт либо заставляет USI получать ISR напрямую изменять состояние системы, либо передавать конечный автомат ISR через дополнительные промежуточные состояния либо для получения дополнительных данных, либо для передачи многобайтового ответа обратно на хост.Я не буду воспроизводить код здесь, потому что это в значительной степени очень длинный оператор switch … case, реализованный на языке ассемблера. Теоретическая скорость передачи данных между контроллером шагового двигателя и его ведущим устройством ограничена несколькими факторами. Во-первых, аппаратное обеспечение абсолютно ограничивает USI для передачи тактовых частот f CK /4 в трехпроводном ведомом режиме. В нашем случае это примерно 895 кГц, и мы должны следить за тем, чтобы мастер SPI не превышал эту скорость. В случае мастера параллельного порта ПК, который мы обсуждаем в этой книге, маловероятно (хотя и не совсем невозможно), что вы сможете обогнать USI.Причина этого связана с древней архитектурой ПК двадцатилетней давности и тем фактом, что параллельный интерфейс разработан для обратной совместимости с 9-контактными матричными принтерами, работающими на медленных 8-битных микроконтроллерах. Из-за этих проблем совместимости регистры параллельного порта концептуально или физически находятся на другом конце моста ISA; они ограничены тактовой частотой шины ISA (номинально 8 МГц) и могут даже иметь дополнительные состояния ожидания. Ниже приведен полный список команд, распознаваемых прошивкой контроллера шагового двигателя. (Мнонические имена определены для вас в e2bus.h): Байт статуса, возвращаемый STEP_CMD_READ_STATATUS, отформатирован следующим образом: Это чрезвычайно простая конструкция управления шаговым двигателем; он предназначен только для низкоскоростного позиционирования и простых приводов с низким крутящим моментом. В проекте E-2 эти модули используются для позиционирования руля направления и плоскости погружения, а также для поворота платформы камеры, ни одно из которых не требует особых требований. Чтобы лучше понять тонкости управления шаговым двигателем, попробуйте запустить этот небольшой фрагмент кода, который предполагает, что у вас есть шаговый модуль, подключенный как устройство E2BUS #0.(Вы найдете этот исходный код вместе с make-файлом в каталоге stepper1 архива с примерами исходного кода): Это займет несколько минут, чтобы выполниться. Пока это происходит, слушайте и наблюдайте за своим мотором. Вы заметите две вещи: Определенные ступенчатые скорости очень шумные, но будет диапазон скоростей — как правило, более высоких скоростей — для которых двигатель сравнительно бесшумный. В зависимости от вашего шагового двигателя, в какой-то момент рампы скорости двигатель, вероятно, перестанет вращаться и просто начнет гудеть.Запишите приблизительное значение скорости, когда это произойдет; для двигателей, которые я использую (без механической нагрузки), это около 240. Второй момент особенно важен и нуждается в пояснении. Попробуйте запустить этот второй фрагмент кода (этот проект находится в каталоге stepper2): Здесь мы пытаемся установить скорость чуть меньше максимально возможной скорости шага, которую мы наблюдали в первом тесте, когда двигатель остановлен, а затем мы попробуй запустить степпер.Вы заметите, однако, что он вообще не вращается — он просто глохнет и скулит, как инженер, которого разбудил будильник его жены. (Если вы не видите такого поведения, немного увеличьте значение скорости, перекомпилируйте и повторите попытку). Чтобы понять, что здесь происходит, нужно подумать о механике ситуации. Когда мы продвигаем фазу шага в программном обеспечении, мы изменяем электрическое состояние катушек, что создает новое положение механического равновесия.По сути, мы перемещаем два холма и долину на четверть фазы, что означает, что двигатель больше не находится в середине долины. Поскольку силы, действующие на ротор по часовой стрелке и против часовой стрелки, больше не равны, ротор вращается, пока снова не окажется в положении равновесия; после этого пошаговая операция завершена. Вышеизложенное объясняет как то, почему мы наблюдаем необоснованный шум шагового двигателя при определенных сочетаниях нагрузки и скорости шага, так и тот факт, что мы не всегда можем мгновенно перейти от стационарной к максимально достижимой скорости шага. На низких скоростях и/или при малых нагрузках двигатель будет привязываться к каждой новой точке равновесия очень быстро по сравнению с шагом и фактически остановится на дне равновесной долины, ожидая следующего изменения магнитного состояния. Это ужасно расточительство энергии — на каждом шагу мы вкладываем достаточно энергии, чтобы преодолеть силы статического трения и передать некоторый угловой момент валу шагового двигателя и прикрепленной к нему нагрузке. Наиболее эффективный способ управления двигателем — это переход к следующему шагу, как только ротор достигнет своего нового положения равновесия; таким образом, вы всегда толкаете груз в нужном направлении. Трудно точно знать, когда это происходит, и это прекрасно ведет к следующему вопросу, который объясняет мой пункт № 2 на стр. С другой стороны, когда двигатель бешено вращается на высоких скоростях, простое прекращение шаговых импульсов, скорее всего, приведет к механическому перерегулированию. Вы, вероятно, не заметите это явление на голом двигателе — по крайней мере, не на маленьких легких двигателях, которые вы, вероятно, будете использовать, — но это очень реальная проблема под нагрузкой. Возможны совершенно общие решения этих проблем (и других, не упомянутых) — например, я должен отметить, что как только двигатель выйдет за пределы текущего положения равновесия, он начнет генерировать противо-ЭДС, которую можно измерить с помощью подходящего датчика. нежный контур.Однако такие сложные решения не требуются для простых низкоскоростных шаговых двигателей, и они выходят за рамки этого текста. Кольцо уровня устройства (эксклюзивно для EtherNet/IP) Шаговые индексаторы/приводы AMCI SD31045E2 и SD17060E2 обладают широким спектром функций и обеспечивают выходной ток до 4,5 или 6,0 ампер, что делает их совместимыми со всей линейкой шаговых двигателей AMCI. Помимо встроенного сетевого интерфейса и коммутатора, интегрированные сетевые приводы AMCI оснащены встроенными индексаторами, обратной связью от энкодера, микрошагом, программируемым выходным током, антирезонансной схемой, ступенчатым управлением скоростью, компактной конструкцией и упрощенной настройкой. AMCI является давним участником программы Rockwell Automation Encompass (партнерство с 1988 г.), и SD17060E2 и SD31045E2 перечислены в качестве решений PartnerNetwork™ в рамках этой программы. Все продукты шагового движения EtherNet/IP от AMCI на 100 % совместимы с ПЛК Allen-Bradley и обеспечивают наилучшую возможную интеграцию ПЛК. О компании Advanced Micro Controls Inc. Контактное лицо для СМИ: Рэйчел Новак Advanced Micro Controls Inc. ### Загрузить версию выпуска
Western Electric Panel Switching Systems
Western Electric Crossbar Switching Systems
North Electric Crossbar Switching Systems
Other Vintage Switching Systems of Note Системы телефонной коммутации Северной Америки
Переключатели
 Стандартный переключатель (слева) представляет собой однополюсный однопозиционный переключатель (SPST). Если вы хотите, чтобы два переключателя управляли одной и той же цепью с одним полюсом, используется двухполюсный (SPDT) переключатель (справа). Все переключатели, используемые в комплексе схемы представляют собой комбинации этих простых устройств.
Стандартный переключатель (слева) представляет собой однополюсный однопозиционный переключатель (SPST). Если вы хотите, чтобы два переключателя управляли одной и той же цепью с одним полюсом, используется двухполюсный (SPDT) переключатель (справа). Все переключатели, используемые в комплексе схемы представляют собой комбинации этих простых устройств. Контакты сильно позолочены, а первоначальная цена была $577,00
Контакты сильно позолочены, а первоначальная цена была $577,00
Крупный план интерфейса кулачка/микропереключателя выше. То кулачки могут быть запрограммированы вручную для управления любой последовательностью операций, которые будет постоянно циклироваться.Скорость цикла можно изменить, заменив шестерни. Это 5-клавишный кулачковый таймер.
То кулачки могут быть запрограммированы вручную для управления любой последовательностью операций, которые будет постоянно циклироваться.Скорость цикла можно изменить, заменив шестерни. Это 5-клавишный кулачковый таймер. Это тип переключателя, который широко использовался в телефонной коммутации. до появления твердотельных схем.Некоторые из них были секвенированы японцами во время Второй мировой войны для шифрования сообщений (фиолетовый машина).
Это тип переключателя, который широко использовался в телефонной коммутации. до появления твердотельных схем.Некоторые из них были секвенированы японцами во время Второй мировой войны для шифрования сообщений (фиолетовый машина). Выберите режим сканирования и шаблон
 Шаблон сканирования определяет, как варианты группируются во время сканирования.
Шаблон сканирования определяет, как варианты группируются во время сканирования. Выберите свой режим

Одиночный переключатель режимов
 Если вы не нажмете переключатель, когда элемент выделен, он будет выбран автоматически.
Если вы не нажмете переключатель, когда элемент выделен, он будет выбран автоматически. Два режима переключения

Выберите шаблон
 После выбора строки сканирование продвигается по кнопкам в ней. Если вы выберете «Сообщение» или «Панель инструментов», сканирование будет проходить по элементам один за другим.
После выбора строки сканирование продвигается по кнопкам в ней. Если вы выберете «Сообщение» или «Панель инструментов», сканирование будет проходить по элементам один за другим. Предлагаемые артикулы
Шаговый двигатель — обзор
3.4 Контроллер шагового двигателя
 Серводвигатели работают намного быстрее, но для гарантированной точности позиционирования необходимо иметь датчик положения на валу, чтобы обеспечить обратную связь о положении привода. Напротив, пока вы не отклоняетесь от номинального профиля ускорения вашей системы (см. ниже), система на основе шагового двигателя может надежно поддерживать свое положение в течение неопределенного времени без повторной калибровки.
Серводвигатели работают намного быстрее, но для гарантированной точности позиционирования необходимо иметь датчик положения на валу, чтобы обеспечить обратную связь о положении привода. Напротив, пока вы не отклоняетесь от номинального профиля ускорения вашей системы (см. ниже), система на основе шагового двигателя может надежно поддерживать свое положение в течение неопределенного времени без повторной калибровки. Этот чип легко доступен по цене около 0,75 доллара США в небольших количествах, и это удобное решение для управления умеренными нагрузками. До недавнего времени этот чип или его близкие родственники часто можно было найти в коммерческих приложениях с шаговыми двигателями, таких как струйные принтеры, а также планшетные и листовые сканеры. Однако в настоящее время он, похоже, находится в упадке, поскольку специализированные микроконтроллеры с сильноточными драйверами на кристалле занимают его рыночное пространство. Что касается цен, вы заметите, что я указал кристалл NTSC colorburst в качестве источника тактовой частоты, несмотря на то, что tiny26L рассчитан на работу на частоте до 8 МГц при напряжении питания 5 В.Я выбрал значение 3,579545 МГц, хотя это не очень удобное целое число для работы, потому что эти кристаллы доступны везде и часто дешевле, чем другие скорости. Скорее всего, у вас уже есть несколько в вашем мусорном ящике. Вы также обнаружите, что в примечаниях по применению микроконтроллеров почти всегда приводятся заранее рассчитанные примерные значения временных констант (например, для установки скорости передачи данных UART) для этой базовой тактовой частоты.
Этот чип легко доступен по цене около 0,75 доллара США в небольших количествах, и это удобное решение для управления умеренными нагрузками. До недавнего времени этот чип или его близкие родственники часто можно было найти в коммерческих приложениях с шаговыми двигателями, таких как струйные принтеры, а также планшетные и листовые сканеры. Однако в настоящее время он, похоже, находится в упадке, поскольку специализированные микроконтроллеры с сильноточными драйверами на кристалле занимают его рыночное пространство. Что касается цен, вы заметите, что я указал кристалл NTSC colorburst в качестве источника тактовой частоты, несмотря на то, что tiny26L рассчитан на работу на частоте до 8 МГц при напряжении питания 5 В.Я выбрал значение 3,579545 МГц, хотя это не очень удобное целое число для работы, потому что эти кристаллы доступны везде и часто дешевле, чем другие скорости. Скорее всего, у вас уже есть несколько в вашем мусорном ящике. Вы также обнаружите, что в примечаниях по применению микроконтроллеров почти всегда приводятся заранее рассчитанные примерные значения временных констант (например, для установки скорости передачи данных UART) для этой базовой тактовой частоты. Режим поезда предназначен для приложений позиционирования. В этом режиме вы даете контроллеру шагового двигателя команду искать определенное смещение от текущей позиции, и он будет автоматически искать эту позицию, пока вы выполняете другие задачи. Шаговый двигатель автоматически отключится, если он нажмет верхний предельный переключатель при поиске вперед или нижний предельный переключатель при поиске назад.
Режим поезда предназначен для приложений позиционирования. В этом режиме вы даете контроллеру шагового двигателя команду искать определенное смещение от текущей позиции, и он будет автоматически искать эту позицию, пока вы выполняете другие задачи. Шаговый двигатель автоматически отключится, если он нажмет верхний предельный переключатель при поиске вперед или нижний предельный переключатель при поиске назад. Возможно, вам придется нажать на рычаг микропереключателя на два шага, чтобы проникнуть сквозь оксидный слой на его контактах; первый шаг в другом направлении может привести к тому, что очищенные металлические контактные поверхности все еще соприкасаются. Или вы можете использовать геркон — вам нужно поднести магнит к определенной близости, чтобы замкнуть переключатель, но более слабого поля будет достаточно, чтобы удерживать переключатель замкнутым. В любом из этих случаев может потребоваться один или несколько «дополнительных» обратных шагов для устранения предельного условия.
Возможно, вам придется нажать на рычаг микропереключателя на два шага, чтобы проникнуть сквозь оксидный слой на его контактах; первый шаг в другом направлении может привести к тому, что очищенные металлические контактные поверхности все еще соприкасаются. Или вы можете использовать геркон — вам нужно поднести магнит к определенной близости, чтобы замкнуть переключатель, но более слабого поля будет достаточно, чтобы удерживать переключатель замкнутым. В любом из этих случаев может потребоваться один или несколько «дополнительных» обратных шагов для устранения предельного условия. На tiny26L есть только два таких прерывания: PCINT0, которое (если включено) срабатывает при изменении состояния контактов PB0-PB3, и PCINT1, которое срабатывает при изменении состояния контактов PA3, PA6, PA7 и PB4-PB7. . Когда срабатывает одно из этих прерываний, нет прямого способа определить, какой контакт вызвал прерывание; вы должны поддерживать теневую копию регистров порта и сравнивать их, чтобы определить, какие контакты изменили свое состояние.
На tiny26L есть только два таких прерывания: PCINT0, которое (если включено) срабатывает при изменении состояния контактов PB0-PB3, и PCINT1, которое срабатывает при изменении состояния контактов PA3, PA6, PA7 и PB4-PB7. . Когда срабатывает одно из этих прерываний, нет прямого способа определить, какой контакт вызвал прерывание; вы должны поддерживать теневую копию регистров порта и сравнивать их, чтобы определить, какие контакты изменили свое состояние. так как он имеет прерывание изменения состояния все для себя.
так как он имеет прерывание изменения состояния все для себя. Когда срабатывает прерывание по переполнению, первое, что делает обработчик, — это перезагружает регистр таймера со значением шага скорости. Значение скорости по умолчанию — $00. Поскольку таймер 0 считает вверх, это означает, что по умолчанию скорость шага составляет примерно 55 Гц, что является самой низкой настраиваемой скоростью.Вы можете настроить более высокие скорости с помощью команды CMD_STEP_SETTICK, за которой следует 8-битный параметр, который устанавливает новое (большее) значение перезагрузки. Например, если вы настроите значение перезагрузки $E0, таймер будет переполняться каждый 33-й ($21) такт, а не каждый 256-й, что даст скорость шага примерно 425 Гц. Теоретически можно указать значение перезагрузки $FF, что приведет к переполнению на каждом такте и скорости шага 14,053 кГц, но на практике существует верхняя граница разрешенных значений для числа перезагрузки таймера.Эта граница устанавливается количеством циклов команд ЦП, необходимых для обслуживания входящего прерывания и подготовки к следующему, и ограничивает скорость шага примерно 7,1 кГц (значение перезагрузки $FE) для дешевого тактового кристалла NTSC colorburst, который я указал.
Когда срабатывает прерывание по переполнению, первое, что делает обработчик, — это перезагружает регистр таймера со значением шага скорости. Значение скорости по умолчанию — $00. Поскольку таймер 0 считает вверх, это означает, что по умолчанию скорость шага составляет примерно 55 Гц, что является самой низкой настраиваемой скоростью.Вы можете настроить более высокие скорости с помощью команды CMD_STEP_SETTICK, за которой следует 8-битный параметр, который устанавливает новое (большее) значение перезагрузки. Например, если вы настроите значение перезагрузки $E0, таймер будет переполняться каждый 33-й ($21) такт, а не каждый 256-й, что даст скорость шага примерно 425 Гц. Теоретически можно указать значение перезагрузки $FF, что приведет к переполнению на каждом такте и скорости шага 14,053 кГц, но на практике существует верхняя граница разрешенных значений для числа перезагрузки таймера.Эта граница устанавливается количеством циклов команд ЦП, необходимых для обслуживания входящего прерывания и подготовки к следующему, и ограничивает скорость шага примерно 7,1 кГц (значение перезагрузки $FE) для дешевого тактового кристалла NTSC colorburst, который я указал. Это не должно быть серьезным препятствием: хотя многие шаговые двигатели рассчитаны на скорость до 10 000 шагов в секунду, в реальных приложениях скорость редко превышает 2000 шагов в секунду (300 об/мин) из-за того, что крутящий момент шагового двигателя быстро уменьшается по мере увеличения шага. скорость увеличивается.Код обработчика Таймера 0 вместе с вызываемыми им подпрограммами выглядит следующим образом:
Это не должно быть серьезным препятствием: хотя многие шаговые двигатели рассчитаны на скорость до 10 000 шагов в секунду, в реальных приложениях скорость редко превышает 2000 шагов в секунду (300 об/мин) из-за того, что крутящий момент шагового двигателя быстро уменьшается по мере увеличения шага. скорость увеличивается.Код обработчика Таймера 0 вместе с вызываемыми им подпрограммами выглядит следующим образом:
 Более того, уровни, которые мы проходим при выполнении вызовов для изменения регистров параллельного порта, добавляют дополнительные задержки, постоянные прерывания SMM на платформе Geode регулярно крадут у нас циклы — и в довершение всего, прикладной уровень в Linux по своей сути настолько нереален. -time, чтобы сделать идею точной разметки шагов задержки в 1 мкс в пользовательской среде действительно глупой.Таким образом, вы заметите, что код SPI, который я привожу в e2bus.c, не содержит явных инструкций по времени для всех изменений состояния. Этот код протестирован на платформе Geode 300 МГц с BIOS 1.23 компании Advantech; если вам нужно полагаться на его безотказную работу, потребуется, как минимум, его тестирование и повторная квалификация на других системах.
Более того, уровни, которые мы проходим при выполнении вызовов для изменения регистров параллельного порта, добавляют дополнительные задержки, постоянные прерывания SMM на платформе Geode регулярно крадут у нас циклы — и в довершение всего, прикладной уровень в Linux по своей сути настолько нереален. -time, чтобы сделать идею точной разметки шагов задержки в 1 мкс в пользовательской среде действительно глупой.Таким образом, вы заметите, что код SPI, который я привожу в e2bus.c, не содержит явных инструкций по времени для всех изменений состояния. Этот код протестирован на платформе Geode 300 МГц с BIOS 1.23 компании Advantech; если вам нужно полагаться на его безотказную работу, потребуется, как минимум, его тестирование и повторная квалификация на других системах. MneMonic Value Описание Описание 0 STEP_CMD_STOP 0 прерывает любую текущую операцию шага.  Обратите внимание, что текущая позиция шага и счетчик оставшихся шагов не изменяются — при необходимости вы можете возобновить пошаговую операцию позже. Катушки шагового двигателя остаются запитанными.
Обратите внимание, что текущая позиция шага и счетчик оставшихся шагов не изменяются — при необходимости вы можете возобновить пошаговую операцию позже. Катушки шагового двигателя остаются запитанными. STEP_CMD_SLEEP 1 Прерывает операцию текущего шага и обесточивает все катушки шагового двигателя. Двигатель может двигаться на шаг или два непредсказуемо, когда вы снова включаете его; может потребоваться калибровка. STEP_CMD_SETTICK 2 Установите скорость шага (чем больше значение, тем выше скорость).Сразу за этой командой должен следовать однобайтовый шаг скорости. STEP_CMD_DRIVE_FWD 3 Запускает двигатель, движущийся вперед с заданной ступенчатой скоростью. Двигатель будет продолжать вращаться до тех пор, пока не будет получена другая команда шага, игнорируя концевые выключатели. STEP_CMD_DRIVE_REV 4 Работает так же, как STEP_CMD_DRIVE_FWD, но шаг назад, а не вперед. 
STEP_CMD_STEP_FWD 5 Шаги вперед на заданное количество шагов или до тех пор, пока не будет замкнут «высокий» концевой выключатель.Сразу за этой командой должен следовать четырехбайтовый счетчик шагов (сначала старший бит). STEP_CMD_STEP_REV 6 Работает так же, как STEP_CMD_STEP_FWD, но выполняет шаг назад, а не вперед, и контролирует «нижний» концевой выключатель. Текущая позиция шага устанавливается на 00000000, когда этот переключатель замкнут. STEP_CMD_FWD_END 7 Непрерывное перемещение вперед до тех пор, пока не будет активирован «высокий» концевой выключатель. STEP_CMD_REV_END 8 Непрерывное перемещение назад до тех пор, пока не будет активирован «нижний» концевой выключатель.Текущая позиция шага устанавливается на 00000000, когда этот переключатель замкнут. STEP_CMD_READ_STATUS 254 Считывает обратно байт состояния контроллера и четырехбайтовую позицию шага. 
STEP_CMD_RESET 255 Выполняет программный сброс. Bit Функция 7 Обнаружено неожиданное прерывание или внутренняя ошибка. 6 Ошибка шага, например, попытка поиска за пределами калиброванного диапазона. (LED2 — ERR — отслеживает состояние этого бита). 5 Зарезервировано. 4 Зарезервировано. 3 Зарезервировано. 2 Верхний концевой выключатель активирован. 1 Включен нижний концевой выключатель. 0 Текущий поиск запрошенной позиции (LED1 – BSY – отслеживает состояние этого бита). 

 Каждое положение ротора шагового двигателя является устойчивым механическим состоянием для определенного соответствующего электрического (магнитного) состояния катушек. Это состояние можно визуализировать как долину между двумя холмами на графике зависимости чистой силы от силы.угол; двигатель пытается найти нижнюю точку впадины, где силы, действующие на ротор по часовой стрелке и против часовой стрелки, равны. Если вы приложите к ротору внешнюю механическую силу, например, по часовой стрелке, вы толкнете вверх одну сторону холма. Если вы нажмете до упора вверх, то когда вы отпустите ротор, он упадет в следующую впадину, т. е. в следующее устойчивое положение шага.
Каждое положение ротора шагового двигателя является устойчивым механическим состоянием для определенного соответствующего электрического (магнитного) состояния катушек. Это состояние можно визуализировать как долину между двумя холмами на графике зависимости чистой силы от силы.угол; двигатель пытается найти нижнюю точку впадины, где силы, действующие на ротор по часовой стрелке и против часовой стрелки, равны. Если вы приложите к ротору внешнюю механическую силу, например, по часовой стрелке, вы толкнете вверх одну сторону холма. Если вы нажмете до упора вверх, то когда вы отпустите ротор, он упадет в следующую впадину, т. е. в следующее устойчивое положение шага. Однако этот процесс не происходит мгновенно, потому что ротор и любая механическая нагрузка, которую он приводит в движение, имеют инерцию. Время, необходимое ротору для нахождения новой точки равновесия, зависит, среди прочего, от инерции (которая определяется механической нагрузкой на двигатель) и силы, действующей на катушки, которая прямо пропорциональна току катушки.
Однако этот процесс не происходит мгновенно, потому что ротор и любая механическая нагрузка, которую он приводит в движение, имеют инерцию. Время, необходимое ротору для нахождения новой точки равновесия, зависит, среди прочего, от инерции (которая определяется механической нагрузкой на двигатель) и силы, действующей на катушки, которая прямо пропорциональна току катушки. Двигатель быстро реагирует и переходит в новое стабильное состояние, но наше управляющее программное обеспечение еще не готово перейти к следующему этапу. Сохраненная инерция двигателя заставляет его начать подниматься по склону следующего «холма», что временно превращает шаговый двигатель в генератор. Энергия, которую мы только что закачали, проходит через схему защиты от переходных процессов и превращается в тепло. Двигатель возвращается в стабильное положение до тех пор, пока не появится импульс следующего шага, после чего весь процесс повторяется.Это, наряду с возможностью простых механических резонансов в двигателе и других компонентах при определенных скоростях, создает громкий и неприятный шум.
Двигатель быстро реагирует и переходит в новое стабильное состояние, но наше управляющее программное обеспечение еще не готово перейти к следующему этапу. Сохраненная инерция двигателя заставляет его начать подниматься по склону следующего «холма», что временно превращает шаговый двигатель в генератор. Энергия, которую мы только что закачали, проходит через схему защиты от переходных процессов и превращается в тепло. Двигатель возвращается в стабильное положение до тех пор, пока не появится импульс следующего шага, после чего весь процесс повторяется.Это, наряду с возможностью простых механических резонансов в двигателе и других компонентах при определенных скоростях, создает громкий и неприятный шум. 66: Мы не прикладываем постоянную силу к ротору; скорее, мы пинаем его периодически. Чтобы наши удары приносили максимальную пользу, мы должны рассчитать их время, чтобы они совпадали с определенными положениями ротора. На низких скоростях двигатель реагирует на шаговые импульсы быстрее, чем мы их выдаем (поэтому можно сказать, что двигатель «управляется» шаговыми импульсами). Однако по мере увеличения скорости мы начинаем все больше полагаться на тот факт, что инерция двигателя доставит его в точку равновесия к тому моменту, когда мы в следующий раз ударим его.Вот почему вы не можете просто запустить двигатель на максимально возможной шаговой скорости — начиная с состояния покоя, ротор не успеет достичь точки равновесия, прежде чем мы перейдем в следующее состояние.
66: Мы не прикладываем постоянную силу к ротору; скорее, мы пинаем его периодически. Чтобы наши удары приносили максимальную пользу, мы должны рассчитать их время, чтобы они совпадали с определенными положениями ротора. На низких скоростях двигатель реагирует на шаговые импульсы быстрее, чем мы их выдаем (поэтому можно сказать, что двигатель «управляется» шаговыми импульсами). Однако по мере увеличения скорости мы начинаем все больше полагаться на тот факт, что инерция двигателя доставит его в точку равновесия к тому моменту, когда мы в следующий раз ударим его.Вот почему вы не можете просто запустить двигатель на максимально возможной шаговой скорости — начиная с состояния покоя, ротор не успеет достичь точки равновесия, прежде чем мы перейдем в следующее состояние. Наиболее распространенным подходом к этому является реализация «профиля ускорения», который представляет собой таблицу скоростей шагов, описывающую, как наиболее эффективно и надежно перейти от одной скорости двигателя к другой. Такие таблицы легко обрабатываются небольшими микроконтроллерами. Усовершенствованные конструкции шаговых двигателей также будут использовать более высокий ток привода (другими словами, более крутые подъемы) для достижения более быстрого изменения скорости.
Наиболее распространенным подходом к этому является реализация «профиля ускорения», который представляет собой таблицу скоростей шагов, описывающую, как наиболее эффективно и надежно перейти от одной скорости двигателя к другой. Такие таблицы легко обрабатываются небольшими микроконтроллерами. Усовершенствованные конструкции шаговых двигателей также будут использовать более высокий ток привода (другими словами, более крутые подъемы) для достижения более быстрого изменения скорости. Встроенный коммутатор Ethernet, добавленный к интегрированным шаговым приводам
Встроенный коммутатор Ethernet в сетевых приводах серии AMCI SD31045E2 и SD17060E2 обеспечивает сетевое подключение для дополнительных устройств и устраняет необходимость в внешний коммутатор Ethernet. Топология DLR обеспечивает отказоустойчивое соединение, которое может обнаруживать разрыв в сети и перенаправлять сетевой трафик, поддерживая связь и время безотказной работы системы.
Топология DLR обеспечивает отказоустойчивое соединение, которое может обнаруживать разрыв в сети и перенаправлять сетевой трафик, поддерживая связь и время безотказной работы системы.
Компания Advanced Micro Controls Inc (AMCI), основанная в 1985 году, является ведущим производителем в США с глобальным присутствием.Наши промышленные средства управления улучшают производительность и рентабельность современных заводов и систем автоматизации. AMCI специализируется на разработке, производстве и продаже восьми различных семейств продуктов. Давние отношения с крупнейшими компаниями в области промышленной автоматизации позволяют нашей команде создавать инновационные, конкурентоспособные продукты, рассчитанные на годы надежной работы.
Телефон: (860) 585-1254 доб.132
Электронная почта: [email protected]
20 Gear Drive
Plymouth Industrial Park
Terryville, CT 06786 USA
Телефон: (860)-585-1254
Факс: (860) 584-1973
http://www.amci. ком